ARM-Linux驱动--RTC(实时时钟)驱动分析
内核版本:Linux 2.6.28
主机平台:Ubuntu 11.04
内核版本:Linux 2.6.39
交叉编译器版本:arm-linux-gcc 3.4.1
原创作品,转载请标明出处http://blog.csdn.net/yming0221/article/details/6584285
1、实时时钟概述
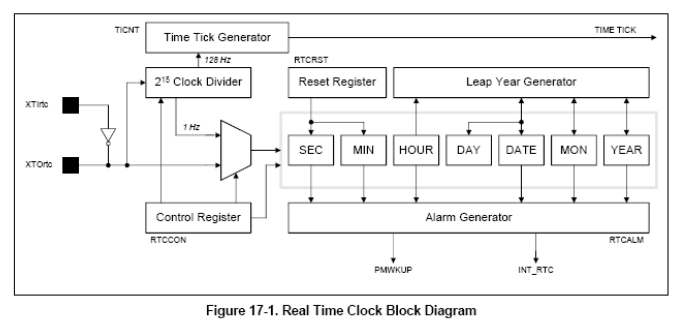
实时时钟(RTC)单元可以在断电的情况下使用纽扣电池继续计时工作。RTC使用STRB/LDRB ARM操作传输二进制码十进制数的8位数据给CPU。其中的数据包括秒、分、时、日期、天、月、年的时间信息。可以执行报警功能。
2、实时时钟操作
下面是RTC模块的电路图
3、RTC寄存器介绍
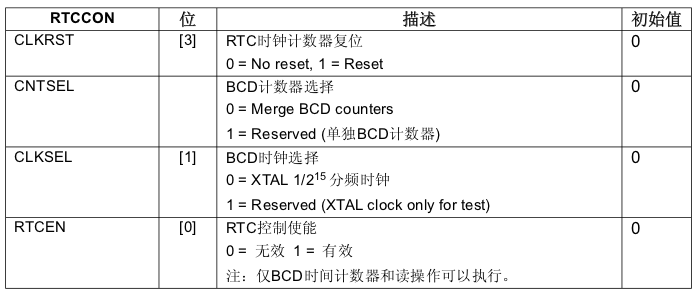
实时时钟控制寄存器(RTCCON)-REAL TIME CLOCK CONTROL REGISTER

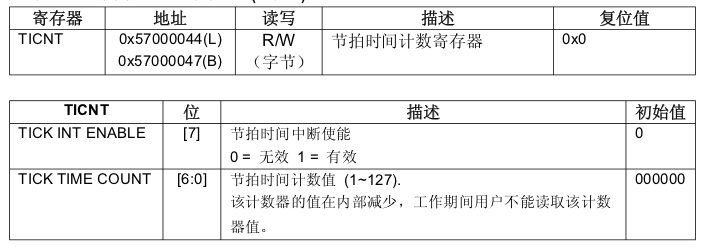
节拍时间计数寄存器(TICNT)-TICK TIME COUNT REGISTER
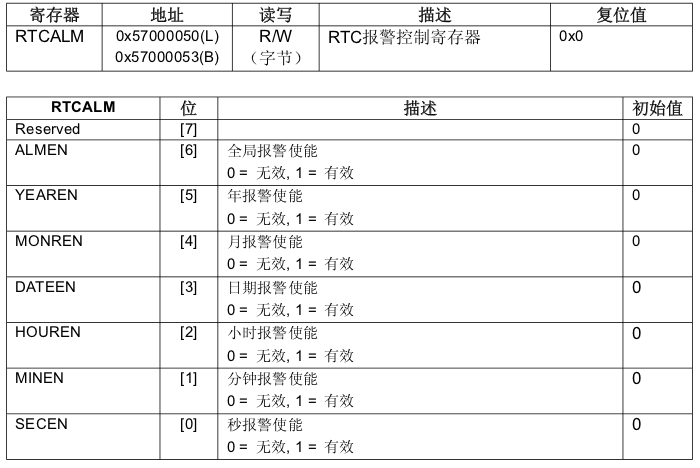
RTC报警控制寄存器(RTCALM)-RTC ALARM CONTROL REGISTER
报警秒数寄存器(ALMSEC)-ALARM SECOND DATA REGISTER

报警分钟计数寄存器(ALMMIN)-ALARM MIN DATA REGISTER

报警小时数据寄存器(ALMHOUR)-ALARM HOUR DATA REGISTER

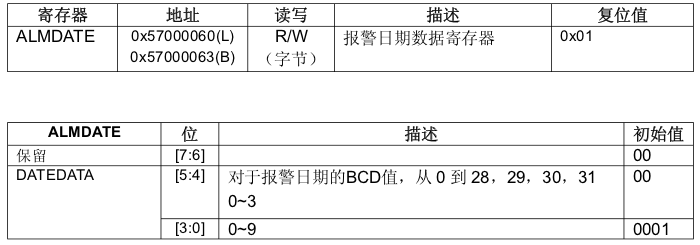
报警日期数据寄存器(ALMDATE)-ALARM DATE DATA REGISTER
报警月数数据寄存器(ALMMON)-ALARM MON DATA REGISTER

报警年数数据寄存器(ALMYEAR)-ALARM YEAR DATA REGISTER

BCD数据寄存器的格式和报警寄存器结构相同,只是对应的地址不同。
BCD秒寄存器(BCDSEC)-BCD SECOND REGISTER 地址:0x57000070(L)0x57000073(B)
BCD分寄存器(BCDMIN)-BCD MINUTE REGISTER 地址:0x57000074(L)0x57000077(B)
BCD小时寄存器(BCDHOUR)-BCD HOUR REGISTER 地址:0x57000078(L)0x5700007B(B)
BCD日期寄存器(BCDDATE)-BCD DATE REGISTER 地址:0x5700007C(L)0x5700007F(B)
BCD日寄存器(BCDDAY)-BCD DAY REGISTER 地址:0x57000080(L)0x57000083(B)
BCD月寄存器(BCDMON)-BCD MONTH REGISTER 地址:0x57000084(L)0x57000087(B)
BCD年寄存器(BCDYEAR)-BCD YEAR REGISTER 地址:0x57000088(L)0x5700008B(B)
4、驱动实例分析
为了使驱动更容易理解,现在这个RTC驱动只完成了计时功能,没有添加相应的报警功能,也没有添加电源管理的功能,缺少的功能今后完善。
下面先总体了解驱动:
首先是RTC驱动的结构体,在/include/linux/platform_device.h中,如下
[cpp]view plaincopy
- structplatform_driver{
- int(*probe)(structplatform_device*);
- int(*remove)(structplatform_device*);
- void(*shutdown)(structplatform_device*);
- int(*suspend)(structplatform_device*,pm_message_tstate);
- int(*suspend_late)(structplatform_device*,pm_message_tstate);
- int(*resume_early)(structplatform_device*);
- int(*resume)(structplatform_device*);
- structpm_ext_ops*pm;
- structdevice_driverdriver;
- };
[cpp]view plaincopy
- staticstructplatform_drivers3c2410_rtc_driver={
- .probe=s3c_rtc_probe,//RTC探测函数
- .remove=__devexit_p(s3c_rtc_remove),//RTC移除函数
- .driver={
- .name="s3c2410-rtc",
- .owner=THIS_MODULE,
- },
- };
[cpp]view plaincopy
- staticint__inits3c_rtc_init(void)
- {
- printk(banner);
- returnplatform_driver_register(&s3c2410_rtc_driver);
- }
- staticvoid__exits3c_rtc_exit(void)
- {
- platform_driver_unregister(&s3c2410_rtc_driver);
- }
platform_driver_register()和platform_driver_unregister()函数在/drivers/base/platform.c中实现的。
可以看出,platform_driver_register()函数的作用就是为platform_driver中的driver中的probe、remove等提供接口函数
[cpp]view plaincopy
- intplatform_driver_register(structplatform_driver*drv)
- {
- drv->driver.bus=&platform_bus_type;
- if(drv->probe)
- drv->driver.probe=platform_drv_probe;
- if(drv->remove)
- drv->driver.remove=platform_drv_remove;
- if(drv->shutdown)
- drv->driver.shutdown=platform_drv_shutdown;
- if(drv->suspend)
- drv->driver.suspend=platform_drv_suspend;
- if(drv->resume)
- drv->driver.resume=platform_drv_resume;
- if(drv->pm)
- drv->driver.pm=&drv->pm->base;
- returndriver_register(&drv->driver);//注册老的驱动
- }
[cpp]view plaincopy
- voidplatform_driver_unregister(structplatform_driver*drv)
- {
- driver_unregister(&drv->driver);
- }
接下来是RTC平台驱动探测函数s3c_rtc_probe,下面函数定义的时候使用了__devinit的作用是使编译器优化代码,将其放在和是的内存位置,减少内存占用和提高内核效率。
probe函数接收到pla
ARMLinux驱动RTC实时时钟驱动分 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)