基于PIC18LF6520的专用接口板设计
航计算机提供。另外,ADS1254E还需要2路时钟信号,即采样时钟信号和串行输出时钟信号,4片ADS1254E的时钟信号严格同步,均由导航计算机提供。详细的硬件结构图参见图4。
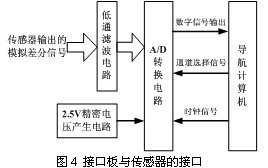
3.5 接口板与导航计算机的接口设计
接口板与导航计算机的接口比较多,主要接口有:与PIC18LF6520通讯的SPI总线,包括电源、地、仿真口、LED指示灯输入电压、PPS信号、A/D转换电路输入/出信号等相关I/O口,与外部设备通讯的扩展UART端口。

PIC18LF6520与导航计算机通过SPI总线通讯,利用PIC18LF6520的MSSP模块来实现。PIC18LF6520的MSSP模块可以工作在两种模式,即SPI模式和I2C模式,本设计中使用SPI工作模式,需要复用单片机的RC3、RC4、RC5和RF7管脚;导航计算机需要为模数转换电路中的AD芯片提供2路时钟信号、2路通道选择信号,并且接收4路数字串行输出信号;最后,导航计算机和接口板之间还留有2个UART扩展端口,为以后的系统升级提供了方便。硬件结构图参见图5,需要注意的是SEL0、SEL1是AD芯片的通道选择信号,4片AD芯片的通道选择信号相同,CLK、SCLK分别是AD芯片的采样时钟信号和串行数据输出时钟信号,4片AD的时钟同步。
4、软件设计
接口板的软件设计主要是对PIC18LF6520的编程,以实现导航计算机、GPS-OEM板、控制机构和主惯导之间的实时数据传输。软件设计分为主程序设计部分和中断服务子程序设计部分。主程序上电后执行参数的初始化和端口设置(SPI端口初始设置为主模式),然后进入循环等待状态;中断服务子程序响应UART端口的中断请求,判断中断源,然后跳转到相应的服务程序,中断服务程序流程图参见图6。
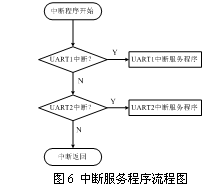
如果是UART1端口的中断,则程序跳转到UART1的中断服务子程序中来。UART1端口负责接收上位机的指令,控制切换整个系统的工作模式,并且根据需要设定系统的参数。程序流程图参见图7。

如果是UART2端口的中断,则程序跳转到UART2的中断服务子程序中来。UART2端口主要是根据当前的工作模式,响应OEM板GPS数据的中断,实时采集OEM接收板串行输出的导航电文,同时完成电文的解码。具体执行流程图参见图8。

5、结论
本文所设计的接口板成功地解决了低成本MIMU/MR/GPS组合导航系统中具有不同接口的设备之间的数据通讯问题。对比市场上常见的一些接口卡,本接口板成本低、尺寸小(只有134mm×116mm),功能集成度高,经过实际调试、使用,证明其性能可靠,功能强大,具有一定的通用性。
参考文献
[1]种秩萌 王 亮 韩崇昭 李峰. 基于DSP和FPGA的ARINC429机载总线接口板的硬件设计[J], 集成电路应用,2004,29(4):65-67
[2]NovAtel Company. SUPERSTAR II Firmware Reference Manual[EB/OL]. Publication No. OM-20000086,2005.06
PIC18LF6520专用接口 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)