ARM中外部中断
时间:11-20
来源:互联网
点击:
在整个ARM体系结构中,为了处理外部中断,依次学习了MMU,模式跳转,异常,GIC,看门狗程序,这些都是为了处理外部中断
具体如下:
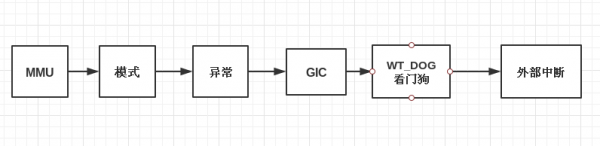
处理外部中断有五个步骤:
30 //step 1: cpu cpsr
31 __asm__ __volatile__(
32 "mrs r0, cpsr\n"
33 "bic r0, r0, #0x80\n"//设置CPSR的I位,将IRQ位打开
34 "msr cpsr, r0\n"
35 ::: "r0"
36 );
37
38 //setp1:GIC
39 ICCICR_CPU0 = 1;
40 ICCPMR_CPU0 = 0xff;
41
前面的代码不解释,和以前的差不多

外部中断号为:64
42//step2:设置中断号
43 ICDDCR = 1;//总开关
44 ICDIPR16_CPU0 = (0x0 < 0);//ICD一共40个寄存器,第16个寄存器,第0位
45 ICDIPTR16_CPU0 = (0x1 < 0);//优先级,最高
46 ICDISER2_CPU0 = (1 < 0);//一共五个,第2个使能中断
47


第二步为设置中断号:
详细看代码注释:寄存器参考手册第594页
48 //step 3: set gpio
49 GPX3CON = (0xf < 8);//是GPXCON为外部中断功能
查看到使用外部中断功能的对应外部寄存器:EXT_INT43:
51 //step 4: extern
52 EXT_INT43CON = (2 < 8);//设置上升沿触发
53 EXT_INT43MASK = 0;//使能中断
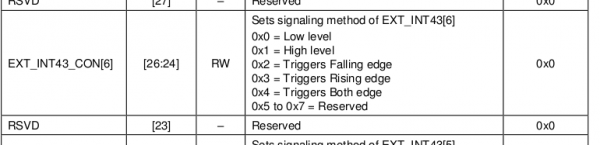
设置外部中断控制器:寄存器参考手册第366页
55 //step 5: source
56 外部中断源这里设置由外部按键K触发:
代码如下
1 #include"regs.h"2 3 int (*printf)(char *, ...) = 0xc3e114d8;4 int(*delay)(int)=0xc3e25f90;5 6 void init_ttb(unsigned long *addr);7 void enable_mmu(void);8 unsigned long data_abort_init();9 void memcopy(unsigned long* dest,unsigned long* source,int len);10 void do_irq();11 void pwm_on(void);12 void pwm_off(void);13 void led_on(void);14 void led_on(void);15 16 int main()17 {18 *(unsigned long *)0x66 = do_irq;19 20 //发生异常时会进入异常模式跳转到0 4地址处理异常事件 21 unsigned long source_addr=data_abort_init();22 //异常事件处理函数23 printf("swi_souce addr is %x\n",source_addr);24 //将异常处理地址的值放到0x6425 memcopy(0x60,source_addr,0x1);26 27 enable_mmu();28 //内存映射将0x04映射到0x6004 29 30 //step 1: cpu cpsr31 __asm__ __volatile__(32 "mrs r0, cpsr\n"33 "bic r0, r0, #0x80\n"//设置CPSR的I位,将IRQ位打开34 "msr cpsr, r0\n"35 ::: "r0"36 );37 38 //setp1:GIC39 ICCICR_CPU0 = 1;40 ICCPMR_CPU0 = 0xff;41 42 //step1:设置中断号43 ICDDCR = 1;44 ICDIPR16_CPU0 = (0x0 < 0);//ICD第16个寄存器,第0位45 ICDIPTR16_CPU0 = (0x1 < 0);//优先级,最高46 ICDISER2_CPU0 = (1 < 0);//一共五个,第2个使能中断47 48 //step 3: set gpio49 GPX3CON = (0xf < 8);//是GPXCON为外部中断功能50 51 //step 4: extern52 EXT_INT43CON = (2 < 8);//设置上升沿触发53 EXT_INT43MASK = 0;//使能中断54 55 //step 5: source56 //57 printf("welcome back! \n");58 }59 60 void pwm_on(void)61 {62 GPD0CON &= ~0xffff;63 GPD0CON = 0x1;//配置寄存器为264 GPD0DAT = 0x1;//date=0xf65 }66 67 void pwm_off(void)68 {69 GPD0CON &= ~0xffff;70 GPD0CON = 0x0;71 // GPD0DAT &=0x0 ;//date=0xf72 73 }74 void led_off(void)75 {76 GPM4CON &= ~0xffff;//清零77 GPM4CON = 0x0;//03位清零78 GPM4DAT = 0x0;//date=0xf关闭置一79 }80 void led_on(void)81 {82 GPM4CON &= ~0xffff;83 GPM4CON = 0x1;//配置寄存器3-0--3-3全为1,全为输出模式84 GPM4DAT &= ~0xf;//打开置0-4位为085 }86 87 void do_irq()88 {89 printf("key 1 down\n");90 static int flag=1;91 if(flag)92 {93 printf("wtc_on\n");94 led_on();95 pwm_on();96 flag=0;97 }98 else if(flag == 0)99 {100 printf("wtc_off\n");101 led_off();102 pwm_off();103 flag=1;104 }105 EXT_INT43PEND = (1 < 2);//清中断106 }107 108 void memcopy(unsigned long* dest, unsigned long* source,int len)109 {110 int i=0;;for(i=0;i> 20] = pa 2;210 //2的目的是将0-2位置为10此时将是小页模式4K211 }212 213 //00-10 ==== 6070214 for(va=0x00; va<=0x10; va+=0x100){215 pa = va+0x60;216 addr[va >> 20] = pa 2;217 }218 219 //10-14 ==== 1014220 for(va=0x10; va<=0x14; va+=0x100){221 pa = va;addr[va >> 20] = pa 2;223 }224 225 //30-40 ==== 5060226 for(va=0x30; va<0x40; va+=0x100){227 pa = va + 0x20;228 addr[va >> 20] = pa 2;229 }230 }231 232 void enable_mmu(void)233 234 {235 unsigned long addr = 0x70;236 init_ttb(addr);237 //step:初始化页表238 239 unsigned long mmu = 1 (1 < 1) (1 < 8);240 //将MMU的第0,1,8位置1241 __asm__ __volatile__(242 "mov r0, #3\n"243 "MCR p15, 0, r0, c3, c0, 0\n"//manager244 "MCR p15, 0, %0, c2, c0, 0\n"//addr 245 "MCR p15, 0, %1, c1, c0, 0\n"// enable mmu246 :247 : "r" (addr), "r" (mmu)248 : "r0"249 );250 printf("MMU is enable!\n");251 }252 253 254 ARM外部中 相关文章:
- ARM外部中断控制寄存器EXTINTn设置方法(11-27)
- ARM中外部中断的配置流程供参考(11-20)
- 利用ARM外部中断控制流水灯的闪烁速度(基于LPC2134)(11-20)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)