ARM嵌入式Linux设备树简介及应用示例
----
$ tar xvf gcc-linaro-4.9-2014.11-x86_64_arm-linux-gnueabihf.tar.xz
$ ln -s gcc-linaro-4.9-2014.11-x86_64_arm-linux-gnueabihf gcc-linaro
----------------------------------------------------------------------------------------
./ 配置环境变量
----------------------------------------------------------------------------------------
$ export ARCH=arm
$ export PATH=~/gcc-linaro/bin/:$PATH
$ export CROSS_COMPILE=arm-linux-gnueabihf-
----------------------------------------------------------------------------------------
./ 修改arch/arm/boot/dts/Makefile文件, 插入"vf610-colibri-my-carrier.dtb"
----------------------------------------------------------------------------------------
dtb-$(CONFIG_SOC_VF610) += \
vf500-colibri-eval-v3.dtb \
vf610-colibri-eval-v3.dtb \
vf610-colibri-my-carrier.dtb \
vf500-colibri-dual-eth.dtb \
vf610-colibri-dual-eth.dtb \
vf610-cosmic.dtb \
vf610-twr.dtb
----------------------------------------------------------------------------------------
./ 编译设备树文件,源代码根目录linux-toradex下,生成的文件可以在arch/arm/boot/dts/下找到
----------------------------------------------------------------------------------------
$ make colibri_vf_defconfig
$ make dtbs
----------------------------------------------------------------------------------------
4). 部署新的设备树文件并测试
a). 将新的设备树文件"vf610-colibri-my-carrier.dtb"放置到目标板Colibri VF61 Linux系统 /boot目录下
b). 如下修改目标板 uboot环境变量
----------------------------------------------------------------------------------------
$ setenv fdt_board my-carrier
$ saveenv
----------------------------------------------------------------------------------------
c). 重启后则系统加载新的设备树文件
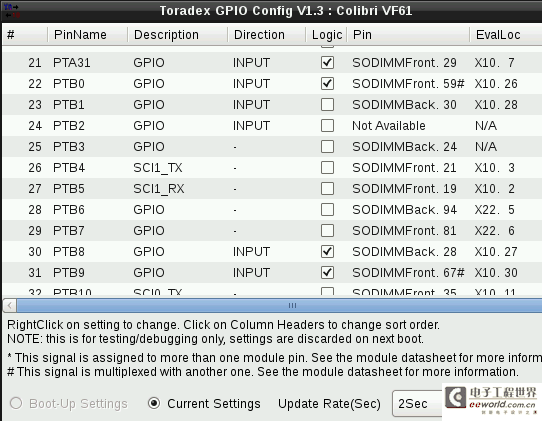
下面两个截图分别是更改前和更改后使用Toradex提供的GPIOConfig工具对PWM对应管脚进行查看,可以看到由原来的PWM属性变成了GPIO,修改成功后则可以按照这里的说明直接调用GPIO使用。

d). 对于CAN,Colibri VF61支持两个CAN接口,CAN0和CAN1,在设备树中使能CAN设备示例如下
./ 编辑vf610-colibri-my-carrier.dts,添加下面内容
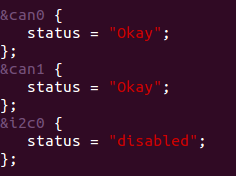
./ 和上述方法一样重新编译设备树文件后部署,然后就可以在系统中调用CAN了,更详细的说明可以参考这里。
ARMLinux设备 相关文章:
- ARM嵌入式LINUX设备驱动设计入门学习(11-19)
- ARM Linux 3.x的设备树(Device Tree)(11-09)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)