stm32的定时器输入捕获与输出比较
TIM_Channel =TIM_Channel_3;
TIM_ICInitStructure.TIM_ICPolarity =TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection =TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler =TIM_ICPSC_div1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
以上是输入捕获配置
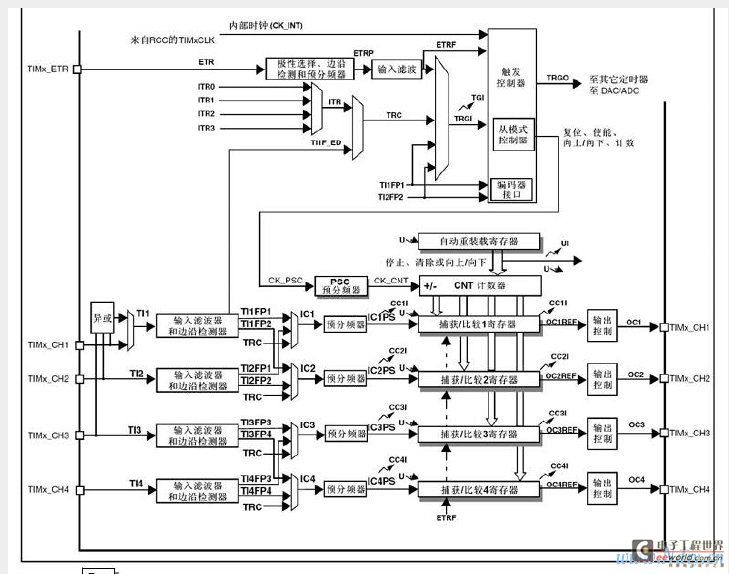
还需要做的工作就是(参考stm32参考手册的TIM的结构框图):
//主从模式选择
这样我们就可以很轻松的就得到了连接在TIM2的通道1上的信号的频率,但是3通道的频率的值永远都是跳动的不准,测试了半天也没有找到根本原因,请看TIM的结构框图的一部分

红色箭头所指,这才找到原因,触发的信号源只有这四种,而通道3上的计数器的值不可能在接受到信号的上升沿时候,有复位这个动作,找到原因了。这就是3 通道上的数据不停跳动的原因,要想得到信号的频率也是有办法的,可以取连续两次捕捉的值之差,这个值就是信号的周期,自己根据实际情况去算频率吧。
有以上可以得到:
stm32的TIM2的四个通道可以同时配置成输入捕捉模式,但是计算CH3,CH4信号的频率步骤有点繁琐(取前后捕捉的差值),但是他的CH1,和CH2可以轻松得到:
通道1
TIMx->CRR1的值即为信号的周期
通道2:
TIMx->CRR2的值即为信号的周期
STM32的定时器外设功能强大得超出了想像力,STM32一共有8个都为16位的定时器。其中TIM6、TIM7是基本定时器;TIM2、TIM3、TIM4、TIM5是通用定时器;TIM1和TIM8是高级定时器。这些定时器使STM32具有定时、信号的频率测量、信号的PWM测量、PWM输出、三相6步电机控制及编码器接口等功能,都是专门为工控领域量身订做的。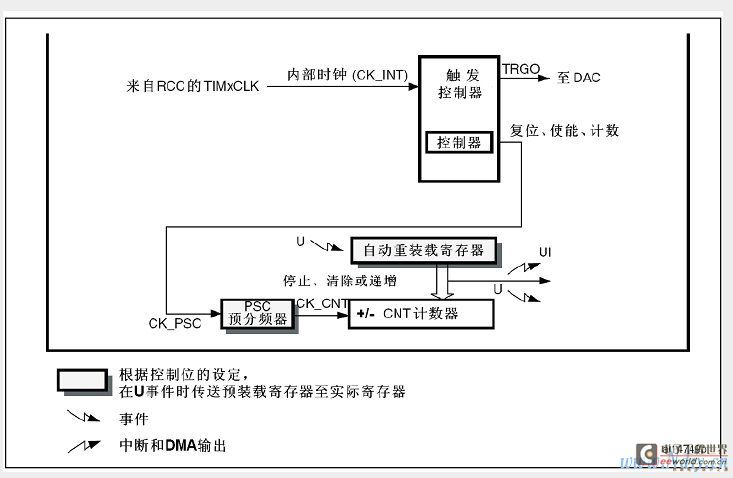
我们来看看它的启动代码:
void TIM2_Configuration(void)
{
}
我们来详细讲解:如何生成PWM脉冲
通用定时器可以利用GPIO引脚进行脉冲输出,在配置为比较输出、PWM输出功能时,捕获/比较寄存器TIMx_CCR被用作比较功能,下面把它简称为比较寄存器。
这里直接举例说明定时器的PWM输出工作过程:若配置脉冲计数器TIMx_CNT为向上计数
stm32定时器输入捕获输出比 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)