用单片机驱动电磁式继电器的方法
电磁继电器是在在输入电路内电流的作用下,由机械部件的相对运动产生预定响应的一种继电器。
它包括直流电磁继电器、交流电磁继电器、磁保持继电器、极化继电器、舌簧继电器,节能功率继电器。
(1)直流电磁继电器:输入电路中的控制电流为直流的电磁继电器。
(2)交流电磁继电器:输入电路中的控制电流为交流的电磁继电器。
(3)磁保持继电器:将磁钢引入磁回路,继电器线圈断电后,继电器的衔铁仍能保持在线圈通电时的状态,具有两个稳定状态。
(4)极化继电器:状态改变取决于输入激励量极性的一种直流继电器。
(5)舌簧继电器:利用密封在管内,具有触点簧片和衔铁磁路双重作用的舌簧的动作来开、闭或转换线路的继电器。
(6)节能功率继电器:输入电路中的控制电流为交流的电磁继电器,但它的电流大(一般30-100A),体积小, 节电功能.
下面是一个小型信号继电器HK4100F-DC5V-SH的实物照片和主要技术参数。。。

HK4100F电磁继电器
品 牌 :汇科(HUI KE)
型 号 : HK4100F-DC5V-SH
外形尺寸(mm): 10.5*15.5*11.8mm(W*L*H)
重 量 : 3.5g
产 地: 中国宁波
触点参数:
触点形式:1C(SPDT)
触点负载: 3A 220V AC/30V DC
阻 抗: ≤100mΩ
额定电流: 3A
电气寿命:≥10万次
机械寿命:≥1000万次
线圈参数:
阻值(士10%): 120Ω
线圈功耗:0.2W
额定电压:DC 5V
吸合电压:DC 3.75V
释放电压:DC 0.5V
工作温度:-25℃~+70℃
绝缘电阻:≥100MΩ
线圈与触点间耐压:4000VAC/1分钟
触点与触点间耐压:750VAC/1分钟
一、继电器驱动原理
HK4100F电磁继电器驱动原理图
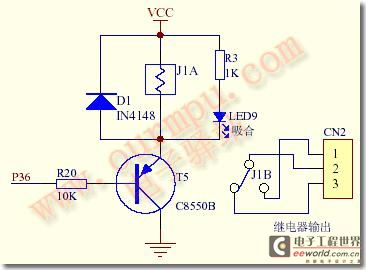
注:上面图中所示,CN2的1、2、3为继电器输出接线端子,其中1接到继电器的常开接点,2接到继电器的动接点,3接到继电器的常闭接点。当继电器吸合的时候,1-2将接通,相当于开关闭合。因此我们就可以在端子1-2上接线来控制其他电路了。
程序流程图
START:
MAIN:
单片机驱动电磁式继电 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)