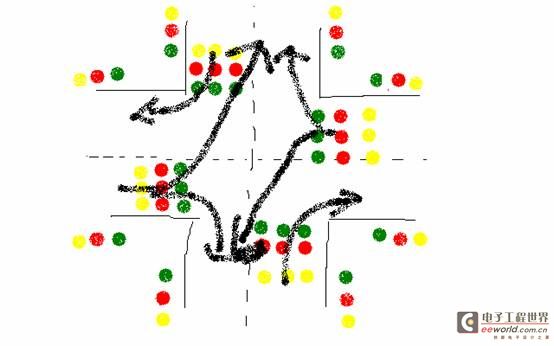
基于AT89C52单片机的交通灯C语言程序
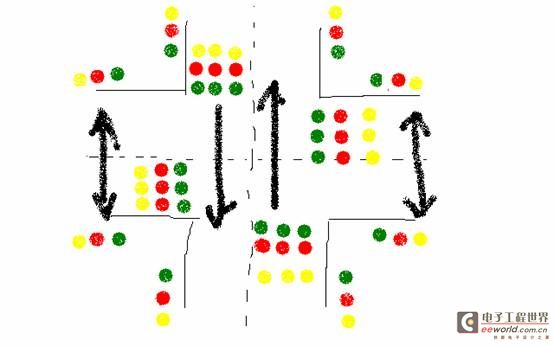
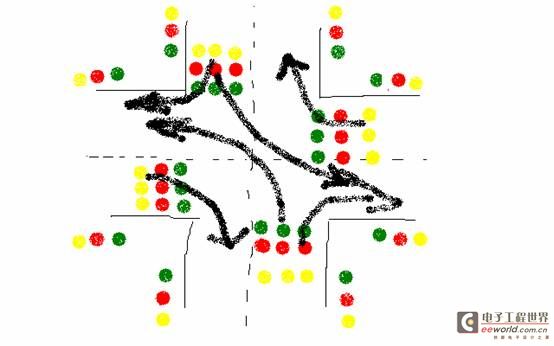
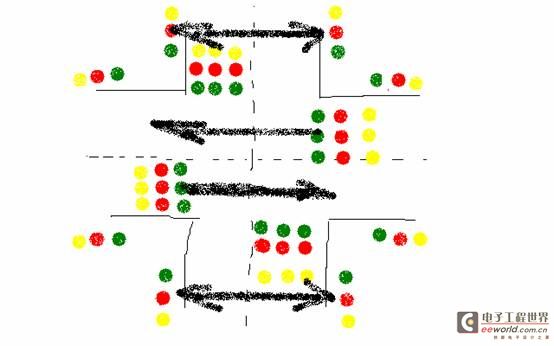
有四个状态0,1,2,3
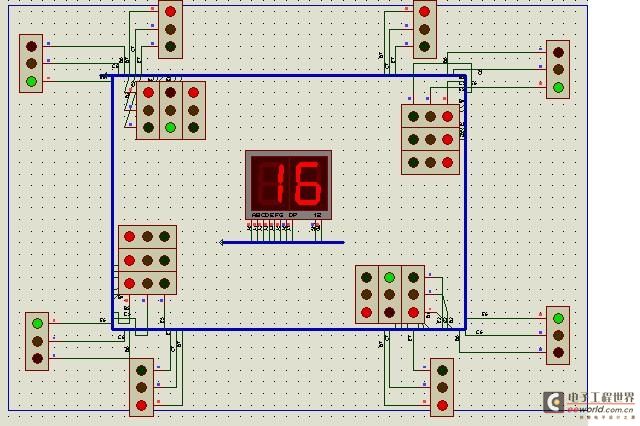
数码管为2位7段共阳数码管,可以通过修改i,j的值进而修改倒计时的长短。
不当地方,敬请批评指正!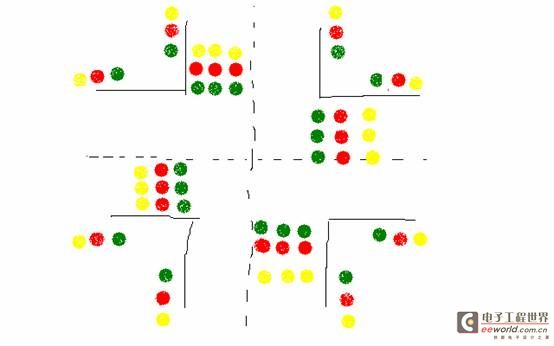

#include
#include
#define uint unsigned int
#define uchar unsigned char
sbit ge=P0^6;
sbit shi=P0^7;
sbit d0=P0^0;
sbit d1=P0^1;
sbit d2=P0^2;
void delay(uint z)
{
}
void shu0()
{
}
void shu1()
{
}
void shu2()
{
}
void shu3()
{
}
void shu4()
{
}
void shu5()
{
}
void shu6()
{
}
void shu7()
{
}
void shu8()
{
}
void shu9()
{
}
void display(uchar p)
{
}
void chushihua()
{
}
void main()
{
}
AT89C52单片机交通 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)