· Vcc/REF 电源输入及参考电压输入(复用)
ADC0832的工作原理:
正常情况下ADC0832 与单片机的接口应为4条数据线,分别是CS、CLK、DO、DI。但由于DO端与DI端在通信时并未同时使用并与单片机的接口是双向的,所以在I/O口资源紧张时可以将DO和DI并联在一根数据线上使用。当ADC0832未工作时其CS输入端应为高电平,此时芯片禁用,CLK 和DO/DI 的电平可任意。当要进行A/D转换时,须先将CS使能端置于低电平并且保持低电平直到转换完全结束。此时芯片开始转换工作,同时由处理器向芯片时钟(CLK)输入端输入时钟脉冲,DO/DI端则使用DI端输入通道功能选择的数据信号。在第一个时钟脉冲的下沉之前DI端必须是高电平,表示启始信号。在第二、三个脉冲下沉之前DI端应输入两位数据用于选择通道功能。
通道地址 | 通道 | 工作方式说明 |
SGL/DIF | ODD/SIGN | 0 | 1 |
0 | 0 | + | - | 差分方式 |
0 | 1 | - | + |
1 | 0 | + | | 单端输入方式 |
1 | 1 | | + |
表1:通道地址设置表
如表1所示,当此两位数据为“1”、“0”时,只对CH0 进行单通道转换。当2位数据为“1”、“1”时,只对CH1进行单通道转换。当两位数据为“0”、“0”时,将CH0作为正输入端IN+,CH1作为负输入端IN-进行输入。当两位数据为“0”、“1”时,将CH0作为负输入端IN-,CH1 作为正输入端IN+进行输入。到第三个脉冲的下降之后DI端的输入电平就失去输入作用,此后DO/DI端则开始利用数据输出DO进行转换数据的读取。从第4个脉冲下降沿开始由DO端输出转换数据最高位Data7,随后每一个脉冲的下降沿DO端输出下一位数据。直到第11个脉冲时发出最低位数据Data0,一个字节的数据输出完成。也正是从此位开始输出下一个相反字节的数据,即从第11个字节的下降沿输出Data0。随后输出8位数据,到第19 个脉冲时数据输出完成,也标志着一次A/D转换的结束。最后将CS置高电平禁用芯片,直接将转换后的数据进行处理就可以了。时序说明请参照图4。
作为单通道模拟信号输入时ADC0832的输入电压是0—5V且8位分辨率时的电压精度为19.53mV,即(5/256)V。如果作为由IN+与IN-输入的输入时,可是将电压值设定在某一个较大范围之内,从而提高转换的宽度。但值得注意的是,在进行IN+与IN-的输入时,如果IN-的电压大于IN+的电压则转换后的数据结果始终为00H。
ADC0832的工作时序
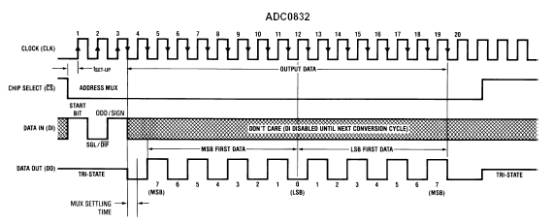
图4 ADC0832工作时序
ADC0832软硬件设计实例
通过以上的理论学习之后,对模—数转换应该有了一定的了解,接下来就根据上文的指导,对ADC0832进行实际应用,以加深印象。本实例功能是将通道1上采样到的电压显示在LED数码管上,通过改变通道1的输入电压变化,观察输出读数。
硬件原理图
图7 硬件原理图
程序流程图
图8 软件流程图
相信看到这里,你应该可以理解我们是如何利用单片机来进行模数转换的处理了,你也可以根据自己的需要来写些AD模数转换相关的应用程序,如数字温度计,湿度传感应用,压力传感应用等等。由于篇幅有限,读者朋友可以通过网站或电子邮件一起交流与学习。在下几期中,我们将陆续介绍51单片机综合学习系统的其它功能原理与应用。
STC单片机的相关程序如下:
#include //定义的 系统头文件和全局变量
#include #define uchar unsigned char
#define uint unsigned int
#define DogReset() WDT_CONTR=0x35
// T1 定时 0.1ms.作为系统计时用,
#definevT01ms2
#definevT10ms10
#definevT100ms10
#definevT01S100// 1 s = 10 ms * 100
#definevT0HVal0xfe//0xff//0xfe//0xf6
#definevT0LVal0x33//0x9c//0x0c//0x4c
uchar code display_AD_channel_ID[2] = {0x00,0x01};
static unsigned char data CS;
uchar data AD_channel_result[2][5]; //各通道A/D转换结果。前是通道号;后是转换的值
uintcT01ms;
ucharcT10ms;
ucharcT100ms;
ucharcT01s;
uchar THTL;
bitOutFlag;
void delay_ms(register uint Count){
register uchar T;
for(;Count>0;Count--){
for(T=0;T<80;T++){
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
}
DogReset();
}
}
void send_char_com(unsigned char OutData){
SBUF = OutData; //输出字符
while(!TI); //空语句判断字符是否发完
TI = 0; //清TI
}
void send_string_com(uchar *str,uchar strlen){
uchar i;
for(i=strlen; i>0; i--){
send_char_com(*str);
str++;
DogReset();
}
}
uchar Ad_Change(uchar channel){
uint AD_Result_Temp = 0 ;
//---------------------将P1.0--P1.1设置成适合AD转换的模式
/// P1 = 0xff;//将P1口置高,为A/D转换作准备
ADC_CONTR = ADC_CONTR|0x80; //1000,0000打开A/D转换电源
P1M0 = 0x03;//0000,0011用于A/D转换的P1.x口,先设为开漏
P1M1 = 0x03;//0000,0011P1.0--P1.1先设为开漏。断开内部上拉电阻
delay_ms(20);//20