RSl0陀螺仪及其在角速率与转角测量中的应用
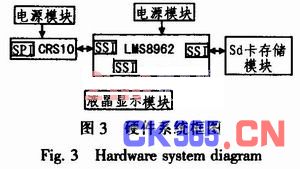
。将采集到的数据存储到SD卡中,将解算得到的结果实时在液晶显示模块上显示。SD卡的数据存储为将来的数据分析提供一个很好的数据采集平台。SSI是串行通信总线,它兼容SPI总线。
2.3 软件设计
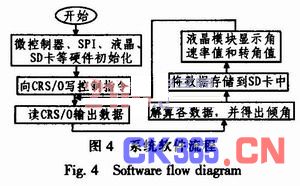
图4是系统的软件设计流程。程序启动进入系统初始化,接下来向CRSl0写控制指令,以设置CRSl0工作在需求的模式下,然后读取返回的数据并进行解算,最后通过存储数据到SD卡中并在液晶模块中显示。
3 试验结果
为了验证系统测量角速率和转角的效果,采用姿态与航向参考系统(attitude and heading reference system)AHRS500GA-226传感器作为参考进行测试。AHRS500GA-226是Crossbow Technology公司的一款高精度的IMU。将两系统固定安装在同一平台上,使CRSl0测量的角速率平面与AHRS的YAW平面(航向角速率和航向角测量平面)相一致。比较两个系统输出的角速率和角度数据,得到如图5所示的结果。
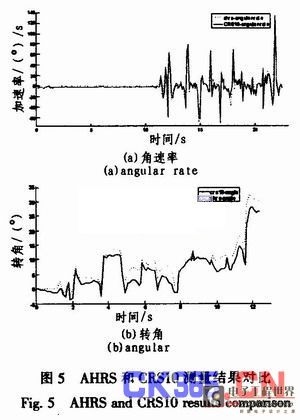
由图中5可看出,CRSl0所测量的角速率与AHRS测量得到的角速率运动的趋势一致,AHRS的结果比较平滑。CRSl0有噪声,局部陡峭。在静止和小角速率运动时两者测量结果基本重合,误差在0.1(°)/s左右。在大角度运动和急速转动时,两者的重合效果不佳,误差较大,有达到7(°)/s。这是由于AHRS得到的数据是经过滤波和数据融合处理的。角度测量的趋势一致,在局部重合的比较好。但角度测量的误差比较大。原因在于本文使用的角度计算方法:1)使用的是原始的角速率数据,角速率没有经过滤波处理,噪声较大,积分叠加到角度上得到的偏差亦较大;2)使用的是简单的积分求角度,没有补偿,没有平滑。综上可知,角速率测量效果比较好,角度测量可行,但算法有待提高。
4 结论
基于LMS8962 ARM微处理器与CRSl0陀螺仪的角速率与转角测量系统角速率测量误差平均为0.550(°)/s,最大达到7(°)/s,在小角速率测量时效果比较好。转角测量误差平均误差为2.5°,测量精度有待进一步提高。造成角度测量误差的原因主要是没有对得到的角速率进行滤波和数据的融合。滤波算法和融合算法的使用和完善是该系统今后要完善的主要工作。从测量的结果来看,只要做好滤波和融合的处理,提高系统的精确性是可行的。
RSl0陀螺仪角速率转角测量AR 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)