基于CAN总线的模块化独立光伏发电控制系统
引言
随着能源日益紧缺和环保压力不断增大,光伏发电技术以其资源丰富、清洁环保、受地域限制小等优点,越来越受到人们的重视。根据对现有光伏发电系统的调查分析,储能蓄电池的使用寿命是导致系统故障和失效的重要因素之一。传统的独立光伏发电系统一般采用单个充电控制器控制太阳能电池板对蓄电池进行充电。该方法基本能够满足小容量蓄电池的要求,但不能胜任大容量蓄电池或蓄电池组。大容量的蓄电池或蓄电池组充电时需要的充电电流较大,充电过程中充电控制器投入/切出充电频繁,对蓄电池冲击较大,易损坏蓄电池。当前,大容量蓄电池和蓄电池组正被逐渐广泛使用,因此,需要更加有效、可靠的充电控制方案。CAN总线有组态灵活、结构简单、可靠性高、通信速度快等特点,可以被用来设计一种新型模块化独立光伏发电控制系统。多个充电模块在管理模块的控制下调整充电PWM的占空比,减小对蓄电池的冲击,有效保护蓄电池,且通过增减充电模块数目,可适应不同容量的蓄电池,有利于扩容。
1 模块化光伏发电系统结构
基于CAN总线的模块化光伏发电控制系统由上位机PC、管理模块、n个充电模块(1≤n≤10)组成。每个充电模块控制单块太阳能电池板对蓄电池进行充电。系统结构如图1所示。
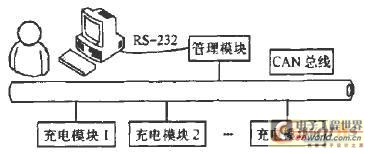
图1 模块化光伏发电控制系统结构
1.1管理模块
管理模块集成了矩阵键盘单元、显示单元、数据存储单元、采样单元、CAN通信单元以及串口通信单元。管理模块的系统结构如图2所示。
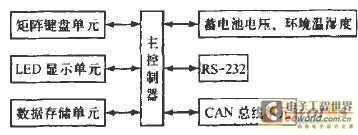
图2 管理模块系统结构
通过人机接口(矩阵键盘单元、显示单元),显示各充电模块工作状态的实时信息,如日发电量、光电池电压、充电电流等;且用户可方便地设置和保存充电控制参数,如浮充电压、均衡电压、温度补偿系数等。管理模块采集蓄电池电压信号经过信号调理、A/D转换送至CPU,软件程序根据蓄电池状态控制充电模块进行充电,并通过CAN总线发送充电控制命令给各充电模块。
1.2充电模块
充电模块内置采样单元,采集对应连接的太阳能电池板的电压及充电电流;PWM充电单元产生PWM波形对充电进行控制。充电模块的系统结构如图3所示。
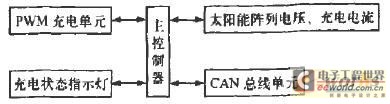
图3 充电模块系统结构
根据管理模块发送的命令,充电模块实时调整充电PwM;同时,每隔1s将自身的充电状态信息上报管理模块。
2 CAN通信协议设计
CAN总线,即控制器局域网,与RS_485等总线相比,CAN总线支持多主工作方式,节点间不分主、从,组网简单,且CAN的信号传输采用短帧结构,信息传输速度快,通信距离最远可达10km(通信速率最高为5 kb/s),通信速率最高可达1 Mb/s(通信距离最远为40 m),实时性好。由于采用了非破坏性总线仲裁技术,通过设置优先级来避免冲突,故可靠性高。
在对实时性、可靠性和扩展灵活性均有较高要求的光伏发电控制系统中,应用CAN总线构建其模块化的系统结构,是比较适合的。
CAN协议是建立在国际标准化组织的开放系统互联模型(Open system Interconnect,OSI)基础上的,其模型结构只有三层,即底层的物理层、数据链路层和应用层。在CAN 2.0中,只规定了物理层和数据链路层,没有定义应用层,需要用户根据自己需求制定应用层协议。在光伏发电控制系统中,CAN总线上传输的数据可分为以下几类:
(1)充电状态信息。由充电模块发送给管理模块,包含充电模块工作状态,如充电方式、充电PWM频率、太阳能阵列电压、充电电流、故障信息等。此类信息数据量较大,广播频率1次/s。
(2)充电控制参数。由管理模块广播给所有充电模块,包含了充电过程中一系列充电配置信息,如浮充电压、均衡电压、均衡时长等。当用户通过管理模块修改充电控制参数后,由管理模块发送命令,修改充电模块对应的参数。
(3)充电控制命令。由管理模块下发给充电模块,包括投Ⅳ切出充电命令、调整充电PWM占空比命令。在未达到充满电压时,管理模块每隔10 s发送命令,让一个充电模块投入充电(充电占空比为100%);接近充满电压时,管理模块每10 ms调整一个充电模块的充电PwM占空比。该类命令数据量较小。
(4)紧急命令。当遇到危险情况(如蓄电池超压、充电过流)需要紧急停机时,由管理模块下发给充电模块。此种命令不定时发送,数据量较小,需要的优先级较高。
系统中,在CAN 2.0B扩展帧格式的基础上,根据光伏发电控制系统的需求特点,制定了一个多帧传输的应用层协议。协议中,将29位信息标志符进行分配如表1所示。
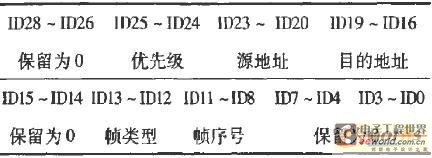
表1 CAN 2.0B标志符分配方案
协议将CAN 2.0B标准的29位标志符细分为优先级、源地址、目的地址、帧类型、帧序号5部分。当不同节点上有数据帧需要同时发送时,优先
光伏发电系统CAN总线模块化结构蓄电 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)