基于Ethernet现场总线的多协议网络通信系统设计与实现
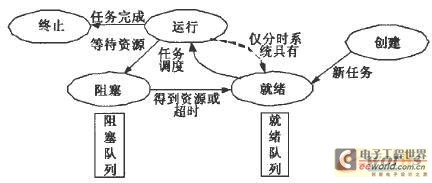
在CPI~CP4的任何阶段中,从站收到主站发送的切换到CP0阶段的MDT报文,则强制切换到CP0阶段。 图8 SERCOSIII初始化流程图 图9 任务调度 2.4 kernel对象设计 为实现实时性的要求,处理器面对多任务时能及时有效地处理各个任务,因此软件系统采取任务的优化处理与调度也即核心对象所要做的工作,其任务调度机制如图9所示。 (1)当产生一个新任务的时候,分配一个任务块。并且将该任务放人“就绪任务队列”中。 (2)当目前任务空闲时,或者运行中的任务进入阻塞态时,任务调度器根据调度规则从“就绪任务队列”中选择取出一个任务,进入运行态。任何时候最多只能有一个任务处于运行态。 (3)当正在运行的任务出现“资源请求等待”的时候,该任务将被转入阻塞态,进入“阻塞任务队列”。阻塞只能由任务自身进行。 (4)当位于“阻塞任务列表”中的任务得到所等待的“资源”之后,该任务由相应的任务程序激活,进入“就绪任务列表”。 (5)如果位于“阻塞任务列表”中的任务超过规定时间仍然没有得到所等待的“资源”(超时),该任务被系统激活,进入“就绪任务列表”。 (6)位于运行态的任务运行结束后,该任务完成,释放任务区,任务调度进入空闲。 3 系统运行与调试结果 为了验证设计方案和关键技术的可行性和系统的稳定性、可靠性,选用5块这样的接口卡通过五类屏蔽双绞线连接的SERCOS总线环路,并在系统运行调试过程中,使用上位机应用软件进行控制参数的设置和状态数据的显示。经过反复的实验显示,基于Ethernet总线的SERCOSIII协议能在本测试系统中顺利完成初始化过程并进入正常操作阶段,能实现在100M速度的情况下两个以太网帧问隔为8 ms,并实现了SERCOSIII协议的同步性要求,系统运行时未出现丢包现象,且WEB访问成功,TCP/IP协议嵌入成功,实现了实现控制设备与互联网的无缝连接。 4 结论 随着数控技术对运动控制总线的高速犁、实时型、高可靠性的进一步要求,以工业以太网作为一种全新的“现场总线”标准不仅已经成为可能,而且也是未来工业控制网络的必然选择。本课题设计的嵌入式Ethernet现场总线多协议控制系统成功的将SERCOSIII协议与TCP/IP协议内嵌到自主研发的控制卡中,能实现控制设备与互联网的无缝连接。系统通过双绞线与光纤进行连接,器件的通用性强,性价比高,可运用于数控、过程控制等领域。 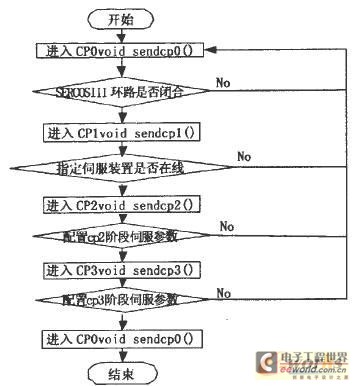
SERCOSIIIEhernet网络通信系统现场总 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)