SPI应用是相当的广了,同步串行总线,同步同步当然需要时钟信号来统一了,这样通讯双方通讯时就比较默契没那么延迟(呆呆)了。应用于中低速场合。
学起来从哪些地方入手呢?如下:
SPI概念与特点 关键的时序接受 编程时重点 STM32内部的SPI使用(介绍、功能、中断)
SPI概念与特点:不多说,串行,需要同步信号 主从结构的 CS(片选) SCK SDI SDO
全双工 一主控多从 8或16位数据通信
其它特点:8个主模式波特率预分频系数 fpcll/2
主模式和从模式下快速通行 并支持切换
编程MSB 或LSB在前
专用发送和接受标志可促发中断
有SPI忙标志位
支持硬件CRC校验,发送模式下crc值作为最后一个字节被发送,接受模式下最后一字节自动CRC校验
支持错误中断标志,支持DMA功能的1字节发送和接受缓冲器:产生发送和接受请求。
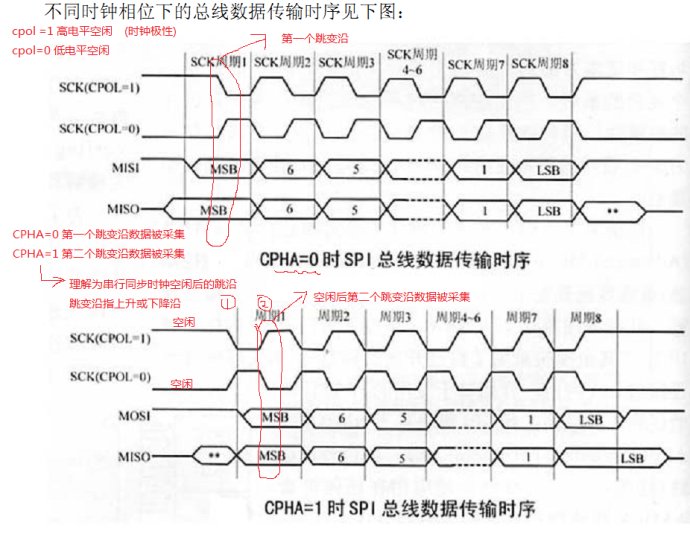
SPI总线时序介绍:
看下下图应该就会了
使用stm32 spi需要以下的步骤
1.管脚因为复用的,故先配置好管脚、并打开spi时钟
2.设置spi的工作模式
通过 SPI1_CR1 来设置,设置SPI1主机模式,设置数据格式8位,然后通过 CPOL 和 CPHA 位来设置 SCK时钟极性及采样方式。并设置 SPI1 的时钟频率(最大18Mhz),以及数据的格式(MSB 在前还是 LSB在前)。
3.使能SPI.
SPI固件库函数
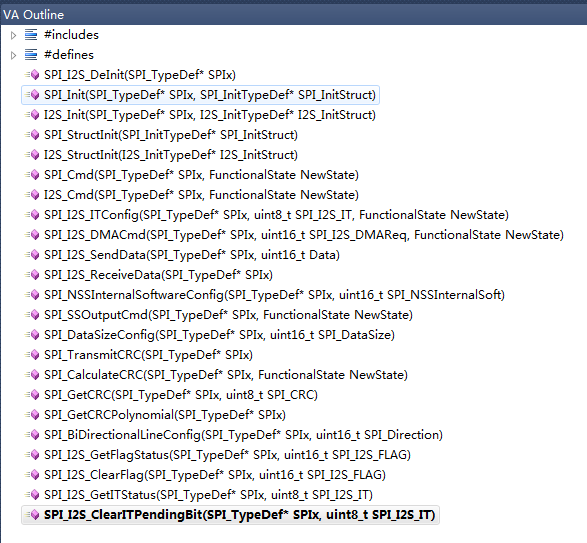
下面是初始化,必须得结构体原型
typedef struct
{
uint16_t SPI_Direction;//设置方向 (2线全双工、2线只接受、一线发送、一线接受)
uint16_t SPI_Mode; //模式 (从或主设备)
uint16_t SPI_DataSize; //宽度 (8或16位)
uint16_t SPI_CPOL; //时钟极性 (低或高)
uint16_t SPI_CPHA; //时钟相位 (第一个或第二个跳变沿)
uint16_t SPI_NSS; //片选方式 (硬件或软件方式)
uint16_t SPI_BaudRatePrescaler; //波特率预分频 (从2---256分频)
uint16_t SPI_FirstBit; //最先发送的位 (最低位,还是最高位在先)
uint16_t SPI_CRCPolynomial; //设置crc多项式 (数字)如7
}SPI_InitTypeDef;
下面是实例,对SPI2进行的初始化
void SPI2_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
//配置SPI2管脚
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 |GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
//SPI2配置选项
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2 ,ENABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
//使能SPI2
SPI_Cmd(SPI2, ENABLE);
}
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
以上是,初始化的一些函数,发现固件库还有很多函数没用上,下面就要谈到应用了
STM32的SPI串行外围总线接口,本程序,是将STM32的SPI配置为全双工模式,且NSS使用的软件模式。在使用SPI前,下面的这个过程我们必须理解,即STM32作为主机发送一个字节数据时,必然能接收到一个数据,至于数据是否处理,由程序操作。
● 全双工模式(BIDIMODE=0并且RXONLY=0)
─ 当写入数据到SPI_DR寄存器(发送缓冲器)后,传输开始;
─ 在传送第一位数据的同时,数据被并行地从发送缓冲器传送到8位的移位寄存器中,
然后按顺序被串行地移位送到MOSI引脚上;
─ 与此同时,在MISO引脚上接收到的数据,按顺序被串行地移位进入8位的移位寄存器
中,然后被并行地传送到SPI_DR寄存器(接收缓冲器)中。
注意:也就是说,在主机模式下,发送和接收是同时进行的,所以我们发送了一个数据,也就能接收到一个数据。而STM32内部硬件是这个过程的支撑!
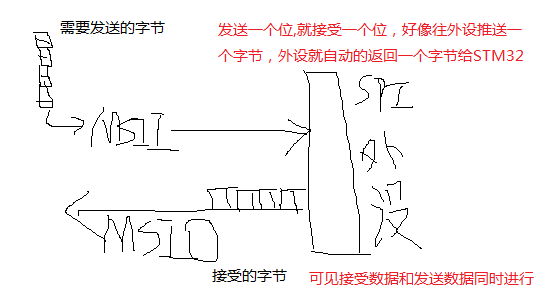
读一个字节,往里面发送0,外设就返回一个数据了,发送的0外设不处理(需要先写入命令生效)
#define SPI_ReadByte(SPIx) SPI_WriteByte(SPIx,0)
写一个字节就直接发送相应的字节,外设就返回一个数据了
u8 SPI_Wri