51四驱无线遥控小车(200米有效距离)
独立的没错,但是GND(负极)都必须是接在一起的。
驱动芯片与电机的接法:
例:左边前后轮:
1Y接电机红线,2Y接电机黑线,左边前轮电机
3Y接电机红线,4Y接电机黑线,左边后轮电机
前进指令:1A=1(输出12V),2A=0(输出0V),3A=1(输出12V),4A=0(输出0V)
后退指令:1A=0(输出12V),2A=1(输出0V),3A=0(输出12V),4A=1(输出0V)
右边的和左边的接法是完全一样的
注意:前进和后退并不是绝对的,因为是直流电机,不刻意的强调正负极,就看你电机是怎么接线的,结果完全可以与我的相反。不过一定要保证电机接线的统一性,不能随意,不能说前轮接的是顺时针线序,后轮是逆时针线序,如果买的电机连接线不带颜色,一定要自己测好了那种接法是顺时针的,哪种是逆时针,否则前轮前进后轮后退,很摧残电机的,或者左右边的2对电机转动方向不统一,导致编程麻烦。
芯片默认输出0V ,所以在没有程序的时候,大家不需要担心电机会转动。一个芯片只能控制2个电机,右边的再接个芯片就可以了,网上卖的模块都是2个驱动芯片的,刚刚好够4个电机。买模块的好处就是拿来可以直接接线,而且模块上有标号,不必担心接错,希望初学者还是买模块,贵是贵了,但是速度有保证的!驱动模块如图:
接好之后,我就说下小车的转动方式:前进后退就是4个电机同时的正转、反转;左转弯和有转弯有2种方式:A一边转动一边不转,B一边正向转动一边反向转动,这两种各有个的好处,各位可以根据自己的实际情况来确定转弯的方式,不同车的底盘效果肯定是不一样的,转弯的方式是程序控制的,本程序是B种方式。
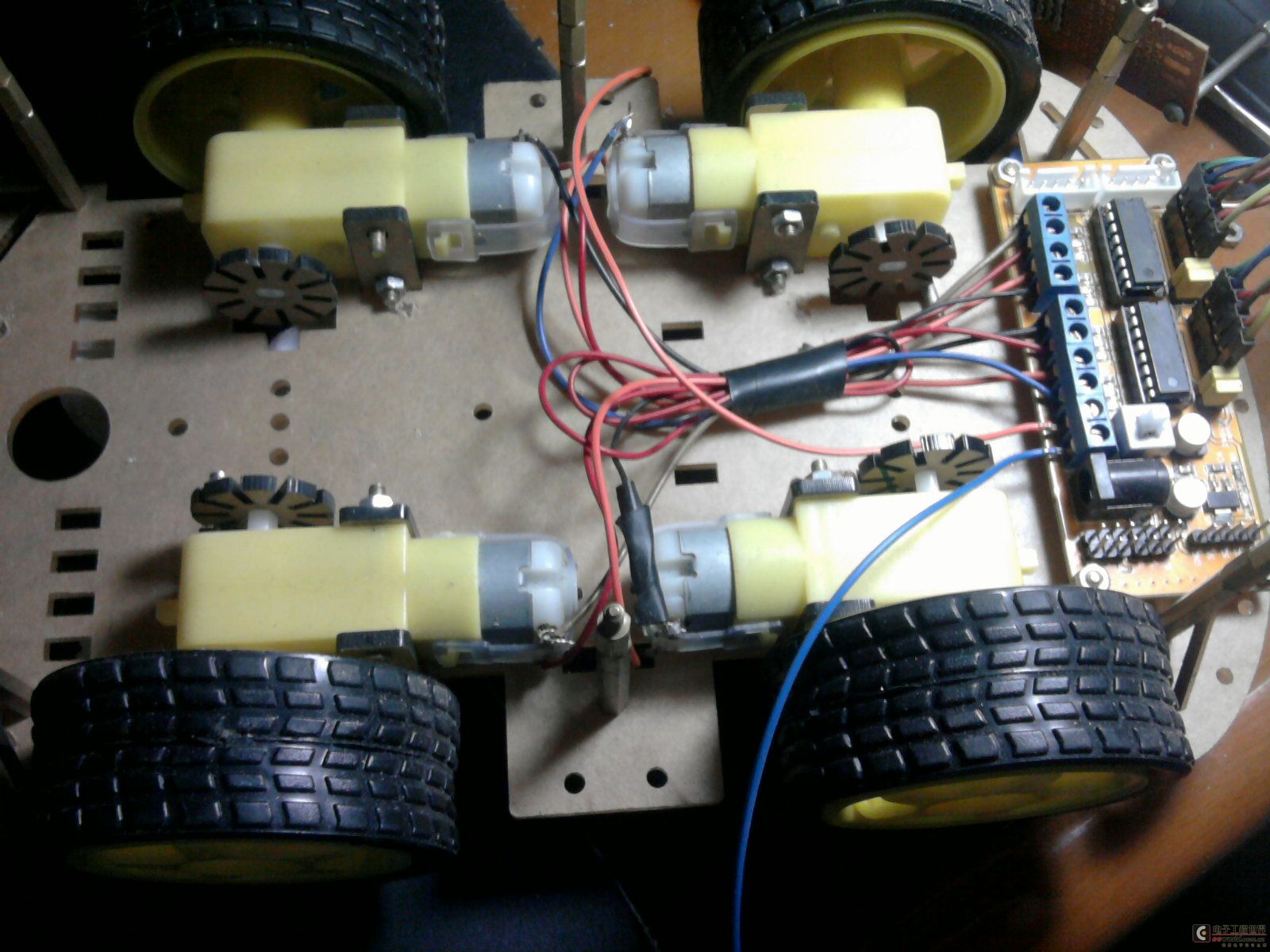
我的小车图:
这种电机是减速的,所以不会很快,如果是直接电机带动的轮子,再用12V电源的话,那速度就非常快了,模块的输出直接连接电机电源线,输出根据标号或根据程序接入到单片机上
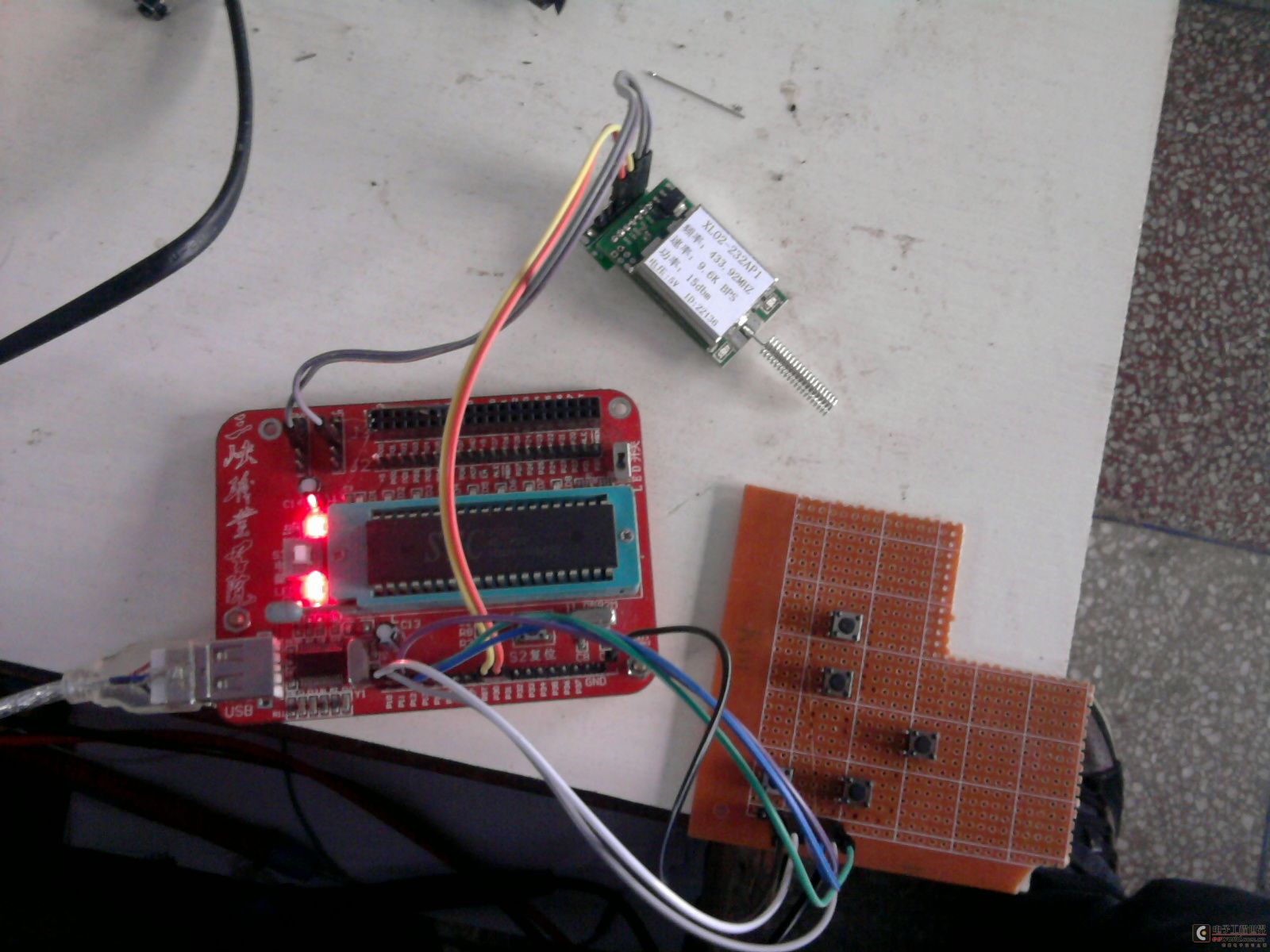
单片机的接线:
如图:

这是我的最小系统板,全部引出IO,带板载USB下载功能,P0口输出接了8路流水灯(有选通开关),这样设计板子是为了P0口做输出时专门看输出状态的。板子是我们工作室自己设计的,我们所有的作品调试都是建立在它的基础上,网上也有的卖这种USB下载板,40元左右吧!
我这个人比较懒,用的是电机驱动模块,L293D的输入是有标号的,1——8直接按照顺序接到P1.0——P1.7就可以了,说到这里,我不得不说一下,单片机的接线是非常自由的,因为是程序控制,无法就是改改端口而已,我只根据我的程序来说明接线,有基础的可以自己设计!
驱动芯片和电机连接好后,就是要把线固定好,留出要与单片机连接的8跟控制线。也要注意给无线模块留一个小空间。
无线模块解说:
我们工作室一直使用的是433无线串口模块,具体型号和价格我会附在清单表里,现在我说下它的性能、这种无线模块最大的好处就是有较强的抗干扰性,2个模块直接可以设置ID,只有在一个ID号下的个模块才可以通信,而且可以实现一对多通信;而且这种模块是无需编程的,直接把数据发送到串口即可,模块会自动调制解调,就目前使用的情况而言,还没发现它有调制解调错误的时候,可以说,在数据传输上,这个模块误码率还是极低的,不过需要注意的是,模块2次接收(发送)之间的间隔要大于200ms,这是非常重要的一个参数,如果想做高速数据传输的朋友请慎重选用!(本段文字来源于淘宝睿迪无线模块手册,本人也已经上传,也请读者尊重该店的著作权)。
模块的接线还是蛮简单的,电源2根线,数据线2根:TX(接单片机RX)、RX(接单片机TX),关于无线模块的设置方案,请参考淘宝睿迪无线XL02-232AP1型号的资料手册。模块在通电的一瞬间红灯绿灯同时会闪一下,然后熄灭,此时进入待机状态,模块发送数据时,红灯亮;接收数据时,绿灯亮。
组装好之后的图:
我用是12v蓄电池,接到驱动模块后,模块的5V输出又可以直接给无线模块和最小系统部分供电。虽然看起来比较笨重,但是12V的电源,与一般的小车在速度和耐力上,都有了本质的提高!
遥控部分:
下面是原理图和hex代码,以后程序我会直接挂在网页上,仿真提供16进制文件


本例仿真图和元件清单下载:
http://www.51hei.com/f/原理仿真14.zip
http://www.51hei.com/f/原件清单14.rar
源代码:;接收程序ORG 0 ;程序起始地址SJMP STAR ;跳转到主程序ORG 30H ;串口中断地址sjmp loop ;跳转到中断服务程序STAR:MOV SP,#5FH ;设置堆栈MOV SCON,#50H ;串行数据格式(详情请参考51手册)MOV TMOD,#20H ;定时器工作方式(请参考51手册)MOV PCON,#0 ;波特率不倍速(请参考51手册)MOV TH1,#0fdH ;设置波特率在9600MOV TL1,#0fdH ;设置波特率在9600SETB EA ;开起中断clr ET1 ;关闭定时1中断SETB ES ;开起串口中断SETB TR1 ;启动定时器1mov a,#0 ;mov p1,a ;设置初始值,即开机p1输出00h小车不动作main:mov p1,a ;把a值给p1端口sjmp main ;无限循环main程序LOOP: jnb ri,$ ;判断接收位是否接收完clr ri ;接收完后清空接收位mov a,sbuf ;发送的数据给areti ;返回后,a的值就会给p1END;发送程序ORG 0 ;程序起始地址SJMP START ;跳转到主程序ORG 30H ;串口中断地址START:MOV SP,#5FH ;设置堆栈MOV TMOD,#20H ;定时器工作方式(请参考51手册)MOV PCON,#0 ;波特率不倍速(请参考51手册)MOV SCON,#50H ;串行数据格式(详情请参考51手册)MOV TH1,#0fdH ;设置波特率在9600MOV TL1,#0fdHsetb EA ;开起中断clr ET1 ;关闭定时1中断setb ES ;开起串口中断SETB TR1 ;启动定时器1main:lcall kcs ;调用按键扫描程序jnz key ;有键按下则跳转到key程序段sjmp main ;无限循环main程序kcs: mov p1,#0ffh ;p1给初值mov a,p1 ;p1的数值给acpl a ;取反aanl a,#0ffh ;与运算ret key:lcall delay ;软件延时程序,按键去抖jb acc.0,send1jb acc.1,send2jb acc.2,send3jb acc.3,send4jb acc.4,send5retDELAY:MOV R5,#20D1:MOV R6,#10D2:MOV R7,#100DJNZ R7,$DJNZ R6,D2DJNZ R5,D1ret send1:mov r1,#10101010b ;前进指令sjmp sendsend2:mov r1,#01010101b ;后退指令sjmp sendsend3:mov r1,#01011010b ;左转指令sjmp sendsend4:mov r1,#10100101b ;右转指令sjmp sendsend5:mov r1,#00h ;停止指令sjmp sendsend: MOV SBUF,r1 ;指令给sbufJNB TI,$ ;判断是否发送完reti ;中断返回END
51四驱无线遥控小车有效距 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)