基于STM32的新型角度测量系统设计
时间:11-29
来源:互联网
点击:
引 脚连接的规范:13、14是两个电压输入引脚VDD,直接与5 V电源连接,同时连接退耦电容CDC,推荐使用0.1μF;4、7是两个接地引脚COM,直接接地;2脚VTP保持开路,不与其他任何引脚相连;3脚ST 是自检输入端,当接VDD时能检查加速度计的功能,平时该引脚开路,也可与COM相连。引脚配置如图3所示。

图3 ADXL202引脚配置
根据芯片的引脚配置图和以上的各类配置,可以设计角度检测模块的硬件电路,其电路原理如图4所示,其脉冲输出端直接与STM32F107的I/O口相连。
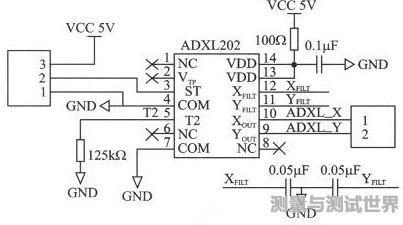
图4 角度采集原理图
2.2 ADXL202测角度工作原理
ADXL202水平放置时的倾角如图5所示。
ADXL202水平放置时,沿X轴和Y轴方向的加速度分量大小与重力的关系为:
AX=g·sin(α), AY=g·sin(β) (3)
式中,AX、AY分别代表加速度计的两个轴上的分量输出,g是以重力作为参考的加速度值,而α、β是倾斜角度。由反正弦函数即可以得到倾斜角度为:
α=sin-1(AX/g),β=sin-1(AY/g) (4)

图5 ADXL202水平放置时的倾角
ADXL202垂直放置时的倾角如图6所示。

图6 ADXL202垂直放置时的倾角
加速度传感器在竖直初始位置时,沿X轴和Y轴方向的加速度分量大小与重力的关系为:
γ=sin-1(AX/g), δ=sin-1(AY/g) (5)
此 角度测量仪
双轴加速度传感器角度测量系统STM3 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)