1602自定义字符显示摄氏度符号
1.当使能端E由1变为0时,执行写指令,数据被写入。
例如,欲写入数据i到DDRAM:
void WDR(uchar i)
{
CheckBusy();//检忙
LCD_RS=1;
LCD_RW=0;
LCD_EN=0;
Delay();
LCD_DATA=i;//数据输出到定义端口
Delay();
LCD_EN=1;
Delay();
LCD_EN=0;//这一步才开始写入到LCD
Delay();
}
2.CGRAM
1602能存储8个自定义字符,这8个自定义字符存储空间的首地址分别是:0X40,0X48,0X50,0X58,0X60,0X68,0X70,0X78。
以0x40来说,它的存储空间如图所示:
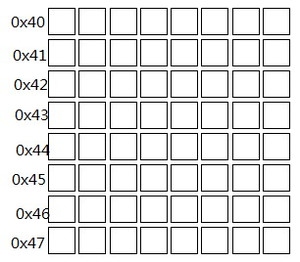
如果使用5*7字符的话,那么最左3位和最后一行的数据实际上是没用的,通常置0。如果要自定义一个℃符号,那么先填框,如图(红1白0):
这样我们就得到每个地址需要写入的数据:
地址:数据
0x40:0x16
0x41:0x09
0x42:0x08
其他类推。将这8个数据写入到对应地址即可。
使用时,先确定显示的位置,例如0X80,然后向DDRAM写入自定义字符的使用代码。0X40-0X78对应为0X00-0X07。
本例中,先写入指令寄存器0X80确定显示位置为第一行第一个,然后写入数据寄存器0X00,这样就会在第一行第一个位置显示出℃符号。


以下是源程序如果网页格式导致部分字符丢失请下载c程序源文件:http://www.51hei.com/f/avr1602c.rar
#include
#include
#define u8 uchar unsigned char
#define u16 uchar unsigned int
#define uchar unsigned char
#define uint unsigned int
uchar zi[]={0x16,0x09,0x08,0x08,0x08,0x09,0x06,0x00}; //自定义字符摄氏度
#include"1602.h"
#include"18b20.h"
void port_init()
{
PORTA=0xff;
DDRA=0xff;
PORTB=0xff;
DDRB=0xff;
PORTC=0xff;
DDRC=0xff;
PORTD=0xff;
DDRD=0x00;
}
void setzi() //把设定字存入CGRAM
{
uchar i;
writecmd(0x40); //设置第一个字的起始地址
for(i=0;i<8;i++)
{
writedata(zi[i]);
}
}
void show_temp(uint k)
{
displayonechar(1,1,(k/100)+48);
displayonechar(2,1,(k%100/10)+48);
displayonechar(3,1,.);
displayonechar(4,1,(k%10)+48);
}
void main()
{
uint TT; //显示的温度值
port_init();
delay(1000);
init1602();
displaychar(0,0,"Set zi Test");
setzi();
displayonechar(5,1,0x00); //0x00表示 0x40地址的值
while(1)
{
TT=read_temper();
show_temp(TT);
}
}
//---------------1602.h----------------
#define RS PORTB_Bit0
#define RW PORTB_Bit1
#define EN PORTB_Bit2
#define DATA PORTA
#define busy 0x80
void delay(uint k)
{
uint i,j;
for(i=0;i
}
void wait()
{
uchar val;
DATA=0xff;
RS=0;
RW=1;
__no_operation();
__no_operation();
EN=1;
__no_operation();
__no_operation();
DDRA=0x00;
val=PINA;
while(val&busy)
{
val=PINA;
}
EN=0;
DDRA=0xff;
}
void writecmd(uchar cmd)
{
wait();
RS=0;
RW=0;
__no_operation();
DATA=cmd;
__no_operation();
EN=1;
__no_operation();
__no_operation();
EN=0;
}
void writedata(uchar data)
{
wait();
RS=1;
RW=0;
__no_operation();
DATA=data;
__no_operation();
EN=1;
__no_operation();
__no_operation();
EN=0;
}
{
y&=0x01;
x&=0x0f;
if(y)x|=0x40;
x|=0x80;
writecmd(x);
writedata(dda);
}
void displaychar(uchar x,uchar y,uchar *p)
{
y&=0x01;
x&=0x0f;
while(*p!=)
{
if(x<=0x0f)
{
displayonechar(x,y,*p);
p++;
x++;
}
}
}
void init1602()
{
delay(15);
writecmd(0x38);
delay(5);
writecmd(0x38);
delay(5);
writecmd(0x38);
writecmd(0x80);
writecmd(0x01);
writecmd(0x06);
writecmd(0x0c);
}
//--------------18B20.h------------
uchar teml,temh;
uchar sign;
uchar Flag_1820Error;
uint tempp; //温度值
/*********************************/
void delay_15us(void) //15us左右
{
uchar x=27;
while(x)
{
x--;
}
}
/********************************/
void delay_60us(void) //60us左右
{
uchar x=117;
while(x)
{
x--;
}
}
void init_1820(void)
{
uchar i;
uint j=0;
PORTC|=(1<7); //"1"
PORTC&=~(1<7); //"0"
for(i=0;i<8;i++)delay_60us();//480us以上
PORTC|=(1<7); //"1"
DDRC&=~(1<7); //"PINC7 is INPUT"
delay_15us(); //15~60us
delay_15us();
Flag_1820Error=0;
while(PINC&(1<7))
{ delay_60us();
j++;
if(j>=18000){Flag_1820Error=1;break;}
}
DDRC|=(1<7); //PORTC7 is OUTPUT
PORTC|=(1<7); //"1"
for(i=0;i<4;i++)delay_60us(); //240us
}
/********************************/
void delay_5us(void) //5us左右
{
uchar x=7;
while(x)
{
x--;
}
}
/********************************/
void write_1820(uchar x)
{
uchar m;
for(m=0;m<8;m++)
{
if(x&(1
PORTC|=(1<7); //write"1"
delay_15us(); //15~45us
delay_15us();
delay_15us();
}
else
{PORTC&=~(1<7);delay_15us();//"0",15us
delay_15us(); //write"0"
delay_15us(); //15~45us
delay_15us();
PORTC|=(1<7); //"1"
}
}
PORTC|=(1<7); //"1"
}
/*******************************/
uchar read_1820(void)
{
uchar temp,k,n;
temp=0;
for(n=0;n<8;n++)
{
PORTC&=~(1<7); //"0"
delay_5us();
PORTC|=(1<7); //"1"
delay_5us();
DDRC&=~(1<7); //"PINC7 is INPUT"
k=(PINC&(1<7)); //读数据,从低位开始
if(k)
temp|=(1
temp&=~(1
delay_15us();
delay_15us();
DDRC|=(1<7); //PORTC7 is OUTPUT
}
return (temp);
}
/*************************************/
uint read_temper(void)
{
uchar TX; //小数位
uchar TZ; //整数位
init_1820(); //复位18b20
write_1820(0xcc); // 发出转换命令
write_1820(0x44);
;;;;;;
init_1820();
write_1820(0xcc); //发出读命令
write_1820(0xbe);
teml=read_1820(); //读数据byte1
temh=read_1820(); //byte2
TX=teml&0x0f;
temh=temh<4;
temh|=(teml&0xf0)>>4;
TZ=temh;
tempp=TZ*10+TX;
return tempp;
}
1602自定义字符摄氏度符 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)