LEGO用轨迹传感器
的实际值,可以通过RCX的VIEW功能对采样器的安装位置进行调试。
具体操作模式为:第一次按时,进入调试模式,输出1号采样值,可根据此值调试采样器安装位置,再按依次输出2、3、4号采样值,第五次按前将1、2 号采样器置于轨迹上,3、4置于背景上(轨迹外),输出的是判断域值,此时再按下按钮将保存判断域值,并返回到工作模式,完成调试过程。
在上述过程中,电源指示的闪烁方式为:在调试1号时,闪一下,灭1秒;调试2号时,闪2下,灭1秒;依次到输出判断域值时,闪5下,灭1秒。回到正常工作时连续闪烁。
程序完成纪录轨迹及背景的采样值,计算出判断值以及变化方向,并写入FLASH中保存,不再次进入调试不会被修改。
采样在1ms 中断中完成,建立标志。主程序根据标志启动计算或调试模块,输出对应的结果。
四、使用方法
连接示意图: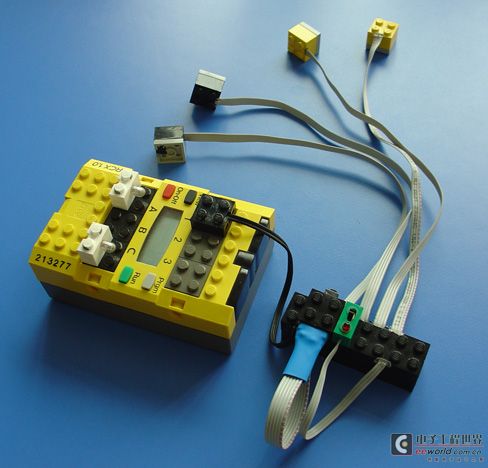
ROBOLAB 程序:
以上程序只是一个示例,对于特殊轨迹没有处理,具体应用时可根据需求添加。
上述采样器的布置方案不是唯一的,可能有更好的模式,我们提供的只是一种思路,希望能起到抛砖引玉的作用。
五、扩展应用
上述模式也可用于其它的应用,如在青少年机器人足球项目中,用于对灰色渐变场地的监测,本采样器在LEGO 提供的练习纸上测试,最黑处约为180,最亮处约为 920,红灰测试块的灰色约为480。而用原配的光感,最黑处约为35,最亮处约为55,红灰测试块的灰色约为 44。
我没有在足球场地纸上试过,但根据这些数据可以初步推论:用于监测足球场地的灰度变化会比原来大有改善,而且,如果使用者有能力用C51编程的话,肯定会使足球水平大有提高。
如果将现在用于监测轨迹的反射采样器换为检测红外球的采样器,那么用在守门员或进攻机器人上,对找球将会有很大的好处,这样RCX可以专注于策略。而且,用LEGO参加足球赛的学校也可以体现出水平了,因为传感器的性能、功能可以根据自己的需要改变,而非统一提供的,大家指标差异有限。
LEGO轨迹传感 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)