机器人教程2:舵机及转向控制原理
2、舵机的组成
3、舵机工作原理
4、舵机选购
5、舵机使用中应注意的事项
6、辉盛S90舵机简介
7、 如何利用程序实现转向
8、51单片机舵机测试程序
1、概述
舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1、图2所示。

图1舵机用于机器人

图2舵机用于智能小车中
舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。

图3舵机外形图
2、舵机的组成
一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
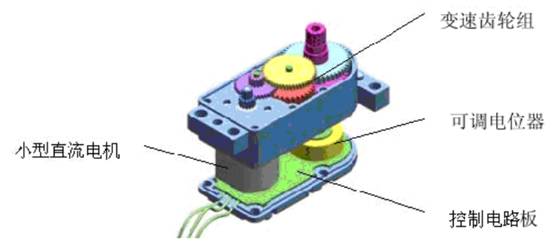
图4舵机的组成示意图

图5舵机组成
舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。

图6舵机的输出线
3、舵机工作原理
控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
流,才可发挥舵机应有的性能。
舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。也就是说,给他提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置上如图7所求。舵机内部有一个基准电路,产生周期为20MS,宽度1.5MS的基准信号,有一个比出较器,将外加信号与基准信号相比较,判断出方向和大小,从而生产电机的转动信号。由此可见,舵机是一种位置伺服驱动器,转动范围不能超过180度,适用于那些需要不断变化并可以保持的驱动器中,比如说机器人的关节、飞机的舵面等。
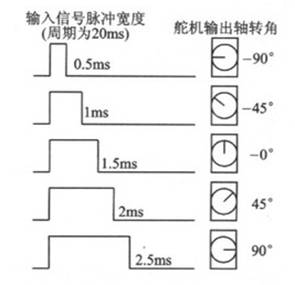
图7舵机输出转角与输入脉冲的关系
4、舵机选购
市场上的舵机有塑料齿、金属齿、小尺寸、标准尺寸、大尺寸,另外还有薄的标准尺寸舵机,及低重心的型号。小舵机一般称为微型舵机,扭力都比较小,市面上2.5g,3.7g,4.4g,7g,9g等舵机指的是舵机的重量分别是多少克,体积和扭力也是逐渐增大。微型舵机内部多数都是塑料齿,9g舵机有金属齿的型号,扭力也比塑料齿的要大些。futabaS3003,辉盛MG995是标准舵机,体积差不多,但前者是塑料齿,后者金属齿,两者标称的扭力也差很多。春天sr403p,Dynamixel AX-12+是机器人专用舵机,不同的是前者是国产,后者是韩国产,两者都是金属齿标称扭力13kg以上,但前者只是改改样子的模拟舵机,后者则是RS485串口通信,具有位置反馈,而且还具有速度反馈与温度反馈功能的数字舵机,两者在性能和价格上相差很大。
除了体积,外形和扭力的不同选择,舵机的反应速度和虚位也要考虑,一般舵机的标称反应速度常见0.22秒/60°,0.18秒/60°,好些的舵机有0.12秒/60°等的,数值小反应就快。
厂商所提供的舵机规格资料,都会包含外形尺寸(mm)、扭力(kg/cm)、速度(秒/60°)、测试电压(V)及重量(g)等基本资料。扭力的单位是kg/cm,意思是在摆臂长度1公分处,能吊起几公斤重的物体。这就是力臂的观念,因此摆臂长度愈长,则扭力愈校速度的单位是sec/60°,意思是舵机转动60°所需要的时间。电压会直接影响舵机的性能,例如FutabaS-9001在4.8V时扭力为3.9kg/cm、速度为0.22秒/60°,在6.0V时扭力为5.2kg/cm、速度为0.18秒/60°。若无特别注明,JR的舵机都是以4.8V为测试电压,Futaba则是以6.0V作为测试电压。速度快、扭力大的舵机,除了价格贵,还会伴随著高耗电的特点。因此使用高级的舵机时,务必搭配高品质、高容量的电池,能
机器人教程舵机转向控 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)