单片机应用系统开发实例
时间:12-02
来源:互联网
点击:
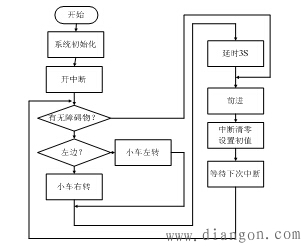
图13 红外避障程序参考流程图
4.循线功能
① 循线原理

(a) (b) (c) (d)
图14 小车循线示意图
一般情况下,选择三个ST178光电传感器,编号分别为A、B、C,如图14所示,B检测到黑线,而A、C没有检测到,那么机器人小车直行;若A 处于黑线上,B、C 在白色区域,那么机器人小车左偏以矫正路线;若C 处于黑线上,A、B 在白色区域,则机器人小车右偏以矫正路线,A 、B 、C 都在黑线上时,机器人小车处于黑线交界处。
② 循线电路图
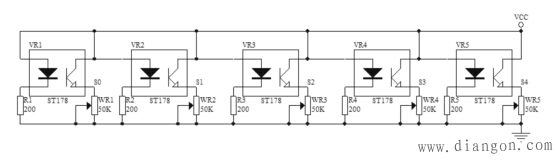
图15 ST178循线电路图
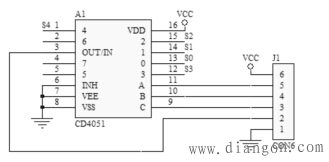
图16 多路通道选择电路图
ATMEGA16移动机器人电机驱 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)