基于多轴运动控制器的间歇式轮转印刷机控制系统
器来追踪轴以及运动的参数。使用轴参数窗口来监视,改变控制器上轴的运动参数。轴参数P_GAIN、I_GAIN、D_GAIN和VFF_GAIN影响着控制系统性能,这四个参数之间也相互影响。稳定不跑位是对不干胶商标印刷机最基本的要求,轴参数P_GAIN和VFF—cAIN对其影响最为明湿。为了简化实验步骤,在轴参数I_GAIN和D—GAIN为定值的情况下,通过调节参数P_GAIN和VFF_GAIN来进行研究。
该控制系统的精确性用随动偏差FE来评估。当印刷轴转速为33.6r/rain,软件示波器采样周期为500res,轴参数I_GAIN=0.01,D—GAIN=0.02时,研究轴参数P_GAIN、VFF_GAIN对随动偏差FE的影响,其实验数据,如表1所示。
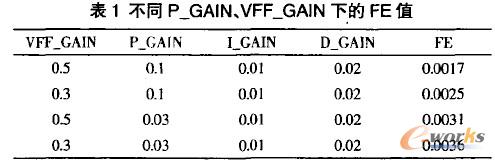

显然,随着轴参数P_GAIN和VFF_GAIN值的减少,随动误差FE逐渐增大。如果FE大于FE—LIMIT设定值,轴状态参数显示出错,同时控制卡发出警报。表1中,P_GAIN=0.03,VFF_GAIN:=0.3,随动偏差FE=.0036,没有超过不干胶印刷允许的误差范围。系统的稳定性直接影响到印刷套位的稳定性,可以用示波器输出波形平滑度和重合度(印刷主轴和拖料轴输出波形重合程度)来衡量。在同等实验条件下,轴参数P_GAIN和VFF.GAIN对示波器波形影响(图略)。当P_GAIN=0.03,VFF_GAIN=0.3时印刷轴和拖料轴电机输出波形重合部分最平滑,此时波形最好。通过印刷实验证明,印刷机工作最稳定,不容易出现跑位。
5 结论
提出了基于Eur0209运动控制器的间歇式轮转印刷机控制系统,利用Eum209运动控制器的强大功能,实现了各印刷轴之间的独立控制运行,比较传统的不于胶有轴印刷机,简化了机械部分,提高印刷精度。实现了集成化和智能化控制。该系统印刷速度每小时最高可达到1 2000印次,最多能印刷八种颜色商标,套印误差在0.03mm内,加减速不走位,已达到不干胶印刷的工业控制要求。
多轴运动控制器控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)