RTAI在开放式数控系统运动控制器中的应用
制紧密相关的。运动控制器大量的硬件设备是由Linux设备驱动程序提供用户软件设备操作接口的.图2中内核层的“运动控制接口”和“现场通信接口”是开放式运动控制器最主要的设备接口。设备驱动程序由于处于Linux内核的最底层,因此相对于上层用户软件又称之为底层软件。


图3 MPC5200微处理器功能框图
设备层是运动控制器的硬件层,在这部分设计过程中需要完成运动控制器的硬件设计,电路设计。嵌入式运动控制器的硬件设计与传统的基于PC机的运动控制器设计有很大不同之处。考虑到面向特殊领域的应用特性,嵌入式系统不能使用桌面系统那样丰富的硬件资源,因此标准的Pc机硬件无法直接应用到嵌入式运动控制器中去,这些决定了开放式运动控制器的硬件设计具有其特殊性。
2.1 硬件结构设计
运动控制器微处理器采用的是摩托罗拉公司于2003年下半年推出的新型的具有广泛发展前景的PowerPC MPC5200.其内部采用了双处理器结构,有一个专门负责通信的协处理器,体现了数据通信的专业构架。并通过双端口内存(这是种极快的数据交换方式)与主处理器通信,从而使主处理器负担大幅度下降。其芯片内部含有丰富的实用型外设。
基于PowerPC内核的MPC5200”“是一颗低功耗、处理速度达760MIPS的嵌入式处理器。它支持以太网、USB、PCI、ATA、12S、12C、SPI、串行接口、J1850和控制区域网(CAN)。同时,它还支持DDR存储器,并集成了一个双精度的浮点单元(FPU),如图3所示。
MPC5200运动控制器是一款非常适合于工业控制领域应用的运动控制器,开放化的特点使其能够应用于多种机械设备上,而通过CAN总线互连组建的现场总线运动控制系统是一种全新的分布式控制系统。因此Mpc5200运动控制器完全可以满足现代数控系统高速化、智能化、网络化、集成化、开放化的需求。
2.2 软件结构设计
在实时Linux下,为了保证数控系统的实时任务能够即时响应。所有和实时相关的任务都必须放在内核层下,每个任务用一个独立的内核进程来执行,实时进程是通过调用RTAI的rt—task—init()函数来实现的。而非实时任务则放在用户层下,它们在任何时候都不会打断实时任务的运行,只有在实时任务结束后才会执行。
嵌入式数控的基本功能由各种功能模块共同来实现的。在以linux为操作系统的开放式平台上集成RTAI的实时内核。通过模块化的设计思想,可以将整个控制系统按照实时性的要求分为用户层模块,内核层实时模块两个大的模块,同时在两个大的模块下又根据不同的子功能分为代码解释模块,人机交互及刀具仿真图形模块,文件管理模块,位置控制模块,插补运算模块,状态监测模块等,如图4所示。
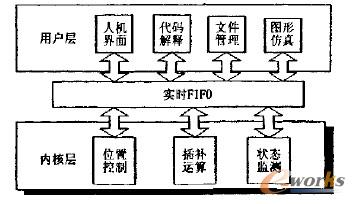
图4系统软件结构图
内核层和用户层之间进程的通讯主要是依靠RTAI提供的实时nFo,通过调用函数rlf_create()来创建管道实现数据传输。FIFO的通信是单向的,因此用户层和内核层的信息交互必须至少创建两条管道才能实现。
3 实时控制的软件实现
根据对开放式运动控制器的运行机制分析,将各实时任务模块分别设置相应的定时器工作方式。优先级及通信队列等。
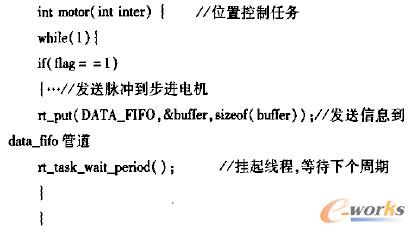
实时功能模块实现方式如下:位置控制任务moor()决定电机控制精度。计算下一周期的实际坐标增量,输出到伺服单元驱动步进电机工作。因此将其设计成周期性RTAI线程.运行周期为4ms,1级优先权。
功能控制任务control()是利用fifo从用户层向内核层传递控制命令,并实现对I/O口的控制。此任务采用实时中断策略,在接受到控制命令,内核挂起位置控制任务。
状态检测任务monitor()要对状态进行实时监控。因此设置此任务运行周期为lOms.优先级为3级。运动控制器软件的所有实时任务和函数包含在实时模块main—program.o中。通过编{t}/etc/rc.sysinit文件,在系统启动时加载到Linux内核中。当实时模块加入到内核中。实时模块中创建的线程和函数就可以访问系统的底层资源。
实时任务模块的加载和卸载在Linux中由initmodule()和cleanup—module()两个函数实现的,同时可以通过这两个函数进行资源的分配和回收,以及线程和处理函数的创建。

4 结束语
本文在深入研究Linux实时操作系统的基础上。将Linux操作系统移植到数控机床上具有实用价值的嵌人式微处理器MPC5200上,证明了数控嵌人式系统完全可以实现一定程度的开放性,且移植Linux也是开发嵌人式数控运动控制器操作平台一种比较好的方案。具有明显的先进性和实用性。
通过一系列的实验分析和应用研究,现已成功将MPC5200运动控制器应用于自主开发的一种基于CAN总线的嵌入式线束机控制系统,该系
RTAI运动控制器开放 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)