基于VB和RS-485总线技术的变频器远程监控系统设计
随着电力电子技术、微电子技术的发展,变频器已广泛应用于交流电动机的速度控制上,尤其是近年来越来越多地利用rs232/rs485串行通讯和工业现场总线技术进行变频器的网络通讯和远程监控,以实现生产线设备之间的实时自动控制及生产流程的实时监控。为满足应用的需要,变频器大多都带有通讯接口。由于rs485网络具有设备简单、容易实现、传输距离远、维护方便等优点而被许多变频器厂家所采用,用户可通过上位机开发通讯程序,监控变频器的运行。本文以emerson(原 avansys)公司 td3000变频器为例,介绍基于rs485总线的计算机对多台变频器的实时监控系统的设计。
2 系统的硬件连接
td3000是 emerson公司推出的高性能矢量控制变频器,能以很高的控制精度进行宽范围的调速运行,它带有内置的标准rs485通讯口,通过转换器可方便地与上位机进行串行通讯,实现上位机对变频器功能码的快速修改及运行状态的直观监控,并实现组网监控运行[2]。本系统组成如图1。
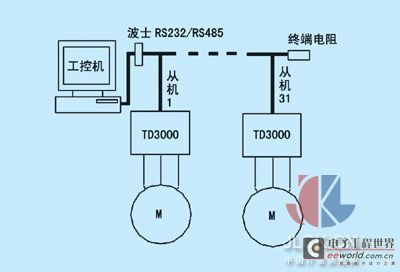
图1 系统配置图
计算机的rs-232口通过一个rs232/rs485转换器转换为rs-485构成通讯网络,以td3000变频器作为从机组成“单主多从”通讯控制网(单监控主机多变频器从机),通讯介质为屏蔽双绞线,屏蔽层一点接地。变频器串行通讯接口端子的接线如图2。
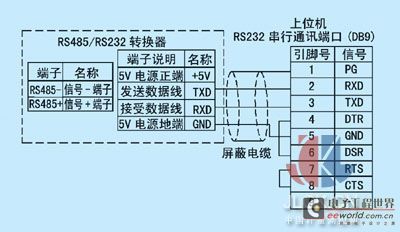
图2 通讯端口接线图
3 td3000变频器的串行通讯协议及相关参数设置
td3000的通讯协议中,其上位机与变频器的通信,通过上位机与变频器之间交换命令和应答实现的。
(1) 物理接口
rs485总线接口:异步、半双工;
总线上每段最多32个站(最多31个从站),可用中继器扩展至127个站(包含中继器)。
(2) 数据格式
1位起始位、8位数据位、1位停止位、无校验;
1位起始位、8位数据位、1位停止位、奇校验;
1位起始位、8位数据位、1位停止位、偶校验;
默认:1位起始位、8位数据位、1位停止位、无校验。
(3) 波特率
9600bps、19200bps、38400bps、125kbps。
默认: 9600bps。
(4) 通信地址
从机的本机地址设置范围2~126。
127号为广播地址,主机广播时,从机不允许应答。
(5) 通信方式
上位机为主机,变频器为从机。采用主机“轮询”,从机“应答”方式。
(6) 协议类型
协议采用长短帧结构:
短帧—用于独立传送自动控制系统所需的控制字和状态字;
长帧—既包括控制字和状态字又含有涉及到操作控制、观测、维护以及诊断等的内容(所具有的内容受变频器自身功能的限制);
特殊报文—用于获取从站的软件版本和机器型号[3]。
表1 数据帧结构
(7) td3000变频器的参数设置
使用通讯方式控制变频器时,应对变频器的通讯数据格式、波特率、通讯地址等进行设置,具体通过设置相应的功能码来完成。下面是对td3000变频器的参数设置:
f0.03=6 频率设定方式选择“通讯给定”
f0.05=2 运行命令选择“通讯控制”
f9.00=3 串行通讯时的波特率设定为9600bps
f9.01=0 串行通讯时的数据格式采用“n,8,1”,即1位起始位,8位数据位,1位停止位,无校验
f9.02=2 本机地址设置2号从机
4 数据帧结构描述
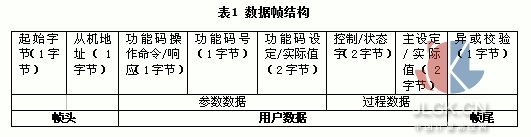
(1) 数据帧结构为:帧头、用户数据、帧尾(见表1)。
帧头包括:起始字节(特殊报文:68h;短帧:7eh;长帧:02h)
从机地址(范围2-126,127为广播地址,0、1号地址保留)。
帧尾包括:校验数据(异或校验,计算方法为本帧数据字节的连续异或结果)。
用户数据包括:参数数据和过程数据两部分(在短帧中没有参数数据)。其中参数数据包括:功能码操作命令/响应、功能码号、功能码设定/实际值。过程数据包括:主机控制命令/从机状态响应、主机运行主设定/从机运行实际值。当主机发送时为“命令”或“设定值”,如对变频器进行开机、关机、正反转、频率设置、参数读取等,当从机(变频器)发送时为对主机命令的“响应”或工作状态及参数“实际值”的反馈。数据遵循先发高字节,再发低字节的原则;如果功能码操作不正确,则用低字节返回操作错误代码,此时高字节为0。
(2) 变频器的运行控制既可以用长帧实现,也可以用短帧实现。本文中仅以长帧为例进行说明,其帧格式如下:
● 计算机到变频器:

●变频器到计算机:

5 通讯程序及监控界面的设计
目前监控系统上位机一般采用windows平台,windows平台下的串行通讯程序设计一般有2种途径:一是直接调用windowsapi函数,响应速度快,但程序设计较复杂;二是采用mscomm串行通讯控件,灵活性稍差,但控件的使用使得通讯程序设计大为简单。在一般控制要求并不太高的情况下,通过第二种途径进行程序开发既能满足控
VBRS-485总线技术变频器远程监控系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)