CAN总线各个功能模块的设计
3、接收信息计数器和接收/发送缓冲器。
1.3.3 CAN_Core设计
CAN_Core为整个CAN控制器的核心,负责处理CAN的协议。核心模块由4个部分组成,结构如图5所示。
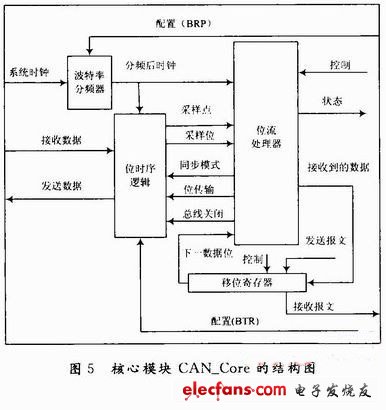
下面简单介绍CAN_Core模块中的位流处理器、位时序逻辑。
位流处理器是CAN总线控制器中控制数据流的发生器。它还执行总线上的错误检测、仲裁、填充和错误处理等功能。主要有接收模块、发送模块、错误管理模块、CRC校验、验收滤波、FIFO等6个模块组成,如图6所示。其中CRC校验、FIFO、验收滤波在所执行的项目中已经有他人设计完成。

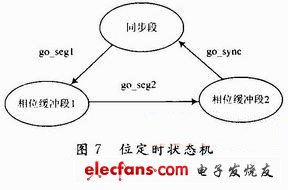
位时序逻辑的设计包括位定时设计、采样点设计、位同步设计3部分。下面以定位时为例介绍其设计。
位定时设计 在位定时设计中采用了一个有3个状态的状态机。3个状态分别对应的是同步段和相位缓冲段1以及相位缓冲段2。传播段占用的时间短,在控制上没有特别的意义,仅作为物理层的传播延时,所以没有设计进状态机,位定时部分的状态机设计如图7所示。
接着使用ModelSim软件对所设计的各个模块和整个CAN总线控制器进行了功能仿真,仿真结果表明达到了设计目标。
2 测试验证
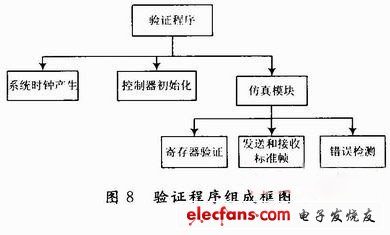
本文最后设计了CAN总线控制器的测试程序,其目的是模拟一块微处理器对CAN总线控制器进行读写操作,从而实现对CAN总线控制器的寄存器访问,完成总线收发功能。在该测试程序编写中,各个功能基本上以任务的形式实现,进行不同的仿真时只需调用相关的任务模块。图8为验证程序的组成框图。
仿真验证完成以后将其HDL CAN总线程序下载到FPGA中进行测试,目标芯片采用Cyclone系列的EP1C6Q240C8,为了验证所设计的FPGA CAN总线控制器,还设计了一款基于该FPGA的CAN总线控制器的节点电路,然后利用所设计的节点电路与其他3个利用SJA1000作为控制器的CAN总线节点进行了通信测试。所有的节点使用AT89S52单片机作为节点微处理器,PCA82C250作为收发器,测试结果表明下载到FPGA中的控制器程序工作正常,实现了预计的CAN总线通讯功能。测试网络示意图如图9所示。
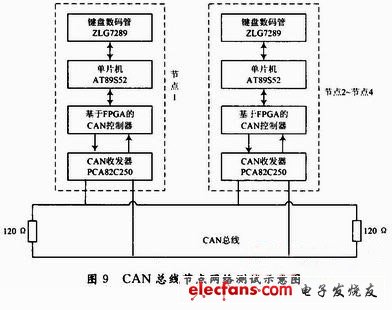
测试时,按动节点1上的开关并将该状态发送到节点2,在节点2上能显示对应的状态,反之也可。同时也可在节点2通过键盘输入某一代码,而在节点1上的数码管上显示相应的结果。该实验结果表明下载到FPGA中的控制器程序工作正常。
3 结语
本项目利用Verilog HDL语言设计了一款CAN总线控制器芯片,并使用ModelSire软件对所设计的CAN总线控制器进行了功能仿真;之后为了验证设计,还编制一个验证程序,并将验证之后的设计配置到了FPGA中;最后用所设计的基于FPGA的CAN总线控制器制作了CAN节点,并与其他采用SJA1000为控制器的CAN节点进行了通讯测试,实现了CAN总线良好的工作,验证了设计的正确性。
CAN总线控制器FPGAVerilogHD 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)