电动客车CAN收发器亚损坏故障排查与检修

在电动客车的运营中,工程师最怕现场出现“时好时坏”的情况,如果CAN节点彻底不通讯,则很有可能是收发器损坏,那进行更换即可;如果车辆运行时出现故障,而将故障节点拆下来测试时,却又可以正常工作,这就非常头疼。
电动客车与传统客车不同,其是使用电池、电容来存储能量,然后通过逆变成交流,带动电动机驱动车辆。当客车加速或者减速时,逆变产生巨大电流变化,而形成强磁场干扰,通过动力线缆耦合到附近CAN总线,会使CAN收发器的损坏率有所上升。而有些时候,CAN收发器是工作在亚损坏状态,就是我们所说的“时好时坏”现象。按照通用的测试标准是很难发现并标定故障,无法及时在车辆检修时排除故障节点。前不久某电动客车厂就遇到了一个亚损坏的案例,广州致远电子股份有限公司派出工程师,协助客户使用CANScope-Pro专业版CAN总线分析仪成功定位亚损坏CAN收发器的原因,并制定车辆检修标定准则,及时排除亚损坏的CAN收发器。为电动客车稳定运行保驾护航。

CANScope眼图分析方法
眼图是逻辑脉冲的重叠,用于测量信号质量。通俗点,就是把所有的“0”和“1”叠加到一起,观测,信号畸变程度的一种统计方法。
例如CAN-bus的ISO11898-1规定显性逻辑的差分输入电压要大于0.9V。如图所示,如果要让CAN总线正常通信,眼图中灰色区域的电平最小值不能小于0.9V。图中使用CANScope的硬件眼图功能测量到的眼高为1.75V,是符合通讯要求的。
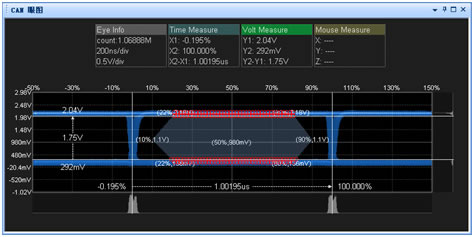
正常的CAN收发器波形眼图
对电动客车上正常的CAN节点做眼图,可见没有明显畸变。

对故障CAN节点做眼图,可见故障节点虽然目前可以通讯,但是波形已经发生畸变。超过显性阀值0.9V的宽度已达4.3us,即表示此时故障节点发出的显性电平(逻辑0)的宽度为4.3us,与标准的4us已经偏差0.3us。

可见在温度变化的情况下,这个位宽度会增大,最后导致总线波特率异常,所有节点都会被其干扰,由于程序中做了自恢复功能,所以这个故障节点无法退出总线,一直在干扰总线,最终导致整车瘫痪。
后续解决方案
针对客户整改目标,致远电子CANScope-Pro分析报告中提出了3个彻底解决措施:
- 1.客户后续研发产品的CAN总线接口均采用CTM1051隔离收发器模块,实现电源和信号隔离限幅,防止强干扰信号形成直流耦合回路,导致收发器损坏;
- 2.目前的车辆全部更换CAN收发器为更新型的TJA1051T,其耐压58V,静电等级为8KV(无需加TVS管),而老收发器PCA82c250耐压仅为36V,静电等级仅为2KV;
- 3.程序中对于一直错误要进行极限处理,不可一直可恢复,如快速自动恢复20次后,延长恢复时间到秒级,保证其他节点可以发出数据。如果连续错误30秒,将停止自恢复,避免把整车其他节点拖死;
- 4.车辆的日常维护检修中,使用CANScope进行眼图分析,排查已经进入亚损坏的收发器,避免车辆运行过程中的故障。
电动客车CAN收发器故障排 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)