针对望远镜机架的电机驱动方案
法电路,其中,为保证输入输出为式(3)的关系,有意在比例电路部分放置了两个1/1 000的精密可调电阻来调节输入输出的线性关系。需注意在使用单电源供电的运放时,比例增益都是相对同相端的电压而言。
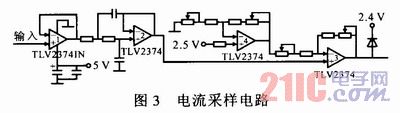
实际调试中,由于经传感器出来的电流信号有高次谐波及其他干扰信号,因此必需设计硬件滤波器进行抑制,该系统设计的二阶低通滤波器的电流检测电路位于上述情况中的第2级,在此考虑到精密弧线电机的超低速,所设计低通滤波器的截止频率为10 Hz,注意电容值的选取,反相端电容通常是同相端电容的2倍,电流采样电路具体实现如图3所示。
3 A/D校正及电流采样实验结果
TMS320F2812自带一个12位带流水线的ADC,而A/D转换的精度直接决定控制系统性能的优劣,如芯片内部A/D转换、A/D转换的增益和偏移都能影响ADC最终结果,这些对使用者而言都已无法改变,用户在使用过程中可通过修改外围硬件设计减少输入误差、调节芯片参数减少输入和转换误差、软件滤波减少输出误差及软件校正提高其转换精度。TMS320F2812的ADC转换精度较差的主要原因是存在增益和偏移误差,要提高转换精度就必须对这两种误差进行补偿。
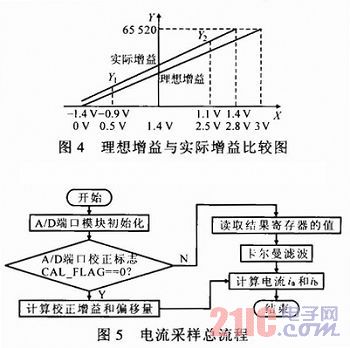
12位的A/D所能表示的数据范围是(0000H~0FFFH),即0~4 095,为充分发挥DSP 16位的特性,将转换结果放在(0000H—FFF0H),即0~65 520。前面已经提到,A/D结果寄存器的值是单极性的数据,而在后续的控制处理程序中,要求转换结果是双极性的数据,对于这种情况,在进行转换时就将其转换成双极性数据。图4为实际采样时理想增益与实际增益模拟量与数字量之间的关系曲线。图中横轴是实际电压,纵轴是转换的数字量,存储在结果寄存器中,实际与理想情况相比存在增益和偏移误差,必须对其校正才能提高其转换精度。根据上述描述,首先编写出校正增益和偏移量的程序,然后用来校正TMS320F2812的其他通道,A/D电流采样总流程如图5所示。
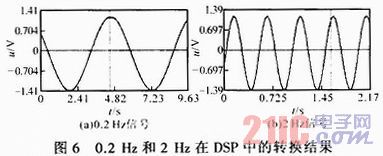
输出的电流由于不可避免地含有噪声,在A/D转换前还必须进行数字滤波,电流采样滤波采用扩展的卡尔曼滤波方法估算实时电流最优化,以提高瞬间电流测试的精度,获得正弦特性的旋转磁场,使PMSM在超低速运行时更平稳。在使用DSP进行A/D转换时,为了提高转换精度,采用校正的方法选取两个基准电压,在此选取0.5 V和2.5 V。基准电压都由上述电压基准芯片提供,校正电路中使用DSP的A/D通道,软件处理使0~.8 V单极性信号直接转换到-1.4~1.4 V的双极性信号,方便了电流环节的信号处理。选取频率为0.2 Hz与2 Hz的信号相比较,两者的转换结果如图6所示,图中横坐标是转换信号的周期,纵坐标是电流信号经传感器后放大电路处理后的电压值。由图可见,硬件电路和软件算法都很好地实现了电流信号的转换。根据实验记录可知,有源滤波电路的截止频率也影响转换结果,如果望远镜的转速很低,在实际应用过程中要考虑降低二阶低通有源滤波器的截止频率。
4 结论
鉴于使用的电机是特别定制的直径2.5 m的组合式弧线交流永磁同步电机,市场上现有的驱动板不能使其正常运行。考虑到驱动系统的复杂性,应尽量简化电路,因此采用单电源供电的运算放大器实现电流采样电路,并且电流采样的精度直接决定了望远镜机架运行的稳定性,进而影响望远镜的跟踪和观测质量,因此该电流采样电路的精度要求较高。
永磁同步电机望远镜 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)