RS-232、RS-422及RS-485串行数据标准的选择及使用
“标准的奇妙之处在于有如此之多的选择。”这句话出现在最近一次关于光缆的会议中,但同样也适用于电气接口标准。随着不同行业内串行数据标准的独立发展,我们拥有的标准从未如此之多。
PC和电信应用领域最成功的串行数据标准可能就是RS-232。相类似,RS-485和RS-422也在工业应用领域最成功的标准之列。这些标准并不直接兼容。然而,对于控制和仪器仪表应用,往往必须在不同标准之间进行通信。本文讨论不同的标准(物理层指标),介绍如何将一种标准转换为另一种标准,并演示如何在相同应用中组合不同的标准。
RS-232电气指标和典型连接
RS-232链路最初用于支持IBM PC上的调制解调器和打印机应用。然而,该标准现在支持各种外设与PC通信。RS-232标准定义为单端标准,用于以较低波特率(<20kbps)提高串行通信距离。多年以来,该标准几经变化,以支持较快的驱动器,例如MAX3225E,该器件能提供1Mbps数据传输速率。为了兼容RS-232,MAX3225E等收发器必须满足表1所列的电气指标。从典型连接(图1)可看出,利用硬件握手来控制数据流。
表 1. RS-232标准的主要电气指标汇总
| 参数 | 条件 | 最小 | 最大 | 单位 |
|---|---|---|---|---|
| 驱动器输出电压,开路 | 25 | V | ||
| 驱动器输出电压,带载 | 3kΩ < RL < 7kΩ | ±5 | ±15 | V |
| 驱动器输出电阻,关断 | -2V < V < 2V | 300 | ||
| 电压变化率 | 4 | 30 | V/µs | |
| 最大负载电容 | 2500 | pF | ||
| 接收器输入电阻 | 3 | 7 | kΩ | |
| 接收器输入门限: | ||||
| 输出 = 串号(逻辑1) | -3 | V | ||
| 输出 = 空号(逻辑0) | 3 | V | ||
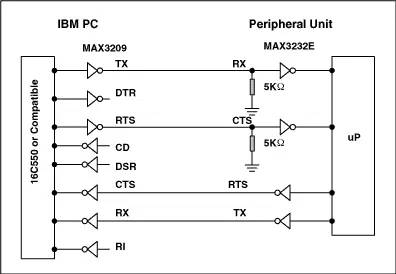
图1. 典型的RS-232连接。
典型RS-232信号(图2,CH1)的摆动范围为正和负。注意左侧坐标轴上0V踪迹标记的相对位置。尽管RS-232数据为反相,从TTL/CMOS到RS-232然后再返回至TTL/CMOS的转换恢复了数据的原始极性。RS-232的典型传输距离很少超过100英尺。原因有两个:首先,发送电平(±5V)和接收电平(±3V)之差只允许有2V的共模抑制;第二,较长电缆的分布电容可能超过规定的最大负载(2500pF),从而降低摆率。由于RS-232被设计为点对点接口,并非多节点接口,所以其驱动器的指标为3kΩ至7kΩ单负载。因此,多节点接口应用通常采用菊链的连接方法(图3)。
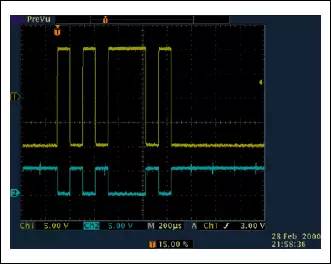
图2. RS-232接收器支持双极性输入信号(上部踪迹,CH1),输出反相的TTL/CMOS信号(底部踪迹,CH2)。
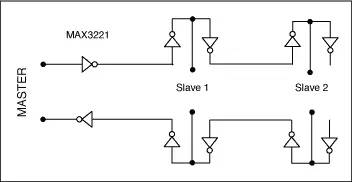
图3. 菊链方法允许在单个RS-232链路上挂接多个从机接收器。
菊链设备及其限制
在菊链配置中,RS-232信号经过第一个接收器,并环回至发送器。对数据发送线中之后的器件重复该配置。该项技术的主要问题是电缆断裂。如果从机1和从机2之间发生断裂,妨碍所有下行器件发送或接收数据。另一种多节点RS-232技术涉及到预缓冲或RS-232输出升压驱动(使其驱动多个并联的5kΩ输入)。
为避免菊链网络相关的问题,Maxim开发了MAX3322E/MAX3323E,专门设计用于多节点应用。这些独特的器件采用了5kΩ逻辑开关输入电阻。器件未被选中时,其输入电阻保持为高阻态,允许与共用总线上的其它器件继续通信。
另一种解决菊链网络问题的方案是将RS-232 Rx和Tx信号转换为RS-422信号(见表2)。RS-422为差分标准,允许传输距离长得多。RS-422较高的输入阻抗,与其较高驱动能力相结合,允许连接多达10个节点(图4)。RS-422的另一种优势是独立的发送和接收通路,无需方向控制。可以利用软件(XON/OFF握手)或硬件(一组独立的双绞线)实现器件之间必要的握手。MAX3162提供了RS-232和RS-422之间进行信号转换的经济途径。更多信息请参见下文的RS-232/RS-485协议转换器部分。
表 2. RS-422关键指标汇总
| 参数 | 条件 | 最小 | 最大 | 单位 |
|---|---|---|---|---|
| 驱动器输出电压,开路 | ±10 | V | ||
| 驱动器输出电压,带载 | RL= 100Ω | 2 -2 | V | |
| 驱动器输出电阻 | A至B | 100 | Ω | |
| 驱动器输出短路电流 | 每输出至公共连接 | 150 | mA | |
| 驱动器输出上升时间 | RL= 100Ω | 10 | %位宽 | |
| 驱动器共模电压 | RL= 100Ω | ±3 | V | |
| 接收器灵敏度 | VCM<±7V | ±200 | mV | |
| 接收器共模电压范围 | -7 | 7 | V | |
| 接收器输入电阻 | 4 | kΩ | ||
| 差分接收器电压 | 可工作 | ±10 | V | |
| 可承受 | ±12 | V |
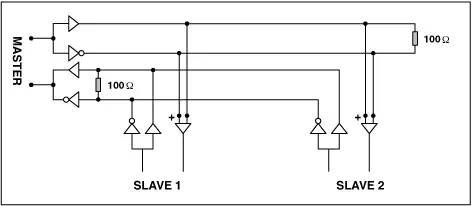
图4. 典型RS-422系统允许差分传输线路上挂接多达10个接收器。
RS-485与RS-422的差异及其在应用中的使用
RS-422和RS-485收发器往往容易混淆,往往将其中一个当做另一个的全双工版本。然而,其共模范围及接收器输入电阻方面的电气差异使得这些标准适合于不同的应用。由于RS-485满足所有的RS-422规范(表3),RS-485驱动器可用于RS-422应用。然而,相反则不成立。RS-485驱动器的共模输出为-7V至+12V,而RS-422的共模范围仅为±3V。RS-422驱动器的最小接收器输入电阻为4kΩ,而RS-485驱动器则为12kΩ。
表3. RS-485关键指标汇总
| 参数 | 条件 | 最小 | 最大 | 单位 |
|---|---|---|---|---|
| 驱动器输出电压,开路 | 1.5 -1.5 | 6 -6 | V V | |
| 驱动器输出电压,带载 | RL= 100Ω | 1.5 -1.5 | 5 -5 | V V |
| 驱动器输出短路电流 | 每输出至公共连接 | ±250 | mA | |
| 驱动器输出上升时间 | RL= 54Ω CL= 50pF | 30 | %位宽 |
RS-232RS-422RS-485串行数据标 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)