现代运动控制系统及其应用
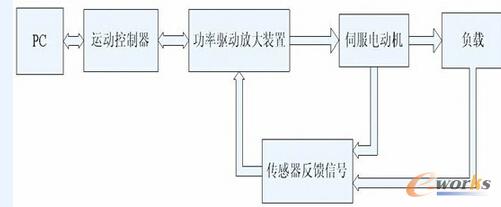

图1 典型运动控制系统组成
运动控制器是以中央逻辑控制单元为核心、以传感器为信号敏感元件、以电机或动力装置和执行单元为控制对象的一种控制装置。其功能在于提供整个伺服系统的闭路控制,如位置控制、速度控制和转矩控制等。
运动控制器的分类
目前市场上的运动控制器根据不同的方法有不同的分类。
按被控对象分类:
根据应用场合被控对象的不同可分为步进电机运动控制器、伺服电机运动控制器和既可以对步进电机进行控制又可以对交流伺服电机进行控制的运动控制器。
按结构进行分类:
基于计算机标准总线的运动控制器
基于总线的运动控制器是利用计算机硬件和操作系统,并结合用户开发的运动控制应用程序来实现的,具有高速的数据处理能力。总线形式上主要有isa接口、pci接口、vme接口、rs232接口和usb接口等。这种运动控制器大都采用dsp或微机芯片作为cpu,可完成运动规划、高速实时插补、伺服滤波控制和伺服驱动、外部i/o之间的标准化通用接口功能,同时随控制器还提供功能强大的运动控制软件库:c语言运动函数库、windows dll动态链接库等,可供用户根据不同的需求,在dos或windows等平台下自行开发应用软件,组成各种控制系统。
例如美国deltatau公司的pmac多轴运动控制器,采用motorola公司的高性能数字信号处理器dsp5600x作为cpu,可以最多同时控制8根轴,与各种类型的主机、放大器、电机和传感器一起完成各种功能。英国阿沃德公司的trio运动控制卡、固高科技(深圳)有限公司的gt系列运动控制器产品和美国ni公司的ni系列运动控制器等都是这类产品。
从用户使用的角度来看,这些基于pc机的运动控制器之间的差异主要是硬件接口(输入/输出信号的种类、性能)和软件接口(运动控制函数库的功能函数)。
soft型开放式运动控制器
基于soft型开放式运动控制器[3>提供给用户很大的灵活性,它的运动控制软件全部装在计算机中,而硬件部分仅是计算机与伺服驱动和外部i/o之间的标准化通用接口,如同计算机中可以安装各种品牌的声卡、cdrom和相应的驱动程序一样。用户可以在windows平台和其他操作系统的支持下,利用开放的运动控制内核,开发所需的控制功能,构成各种类型的高性能运动控制系统,从而提供给用户更多的选择和灵活性。
这种控制器的典型产品有美国mdsi公司的open cnc、德国pa(power automation)公司的pa8000nt,美国soft servo公司的基于网络的运动控制器和国内的固高科技有限公司的go系列运动控制器产品等。soft型开放式运动控制的特点是开发、制造成本相对较低,能够给予系统集成商和开发商更加个性化的开发平台。此类产品的价格国内产品普遍要低于国外产品,但在技术性能上也存在一定差距。
嵌入式结构的运动控制器
这类运动控制器是把计算机嵌入到运动控制器中的一种产品,它能够独立运行。运动控制器与计算机之间的通信依然是靠计算机总线,实质上是基于总线结构的运动控制器的一种变种。在使用中,采用如工业以太网、rs485、sercos、profibus等现场网络通信接口联接上级计算机或控制面板。嵌入式的运动控制器也可配置软盘和硬盘驱动器,甚至可以通过internet进行远程诊断,例如美国adept公司的smartcontroller,固高科技公司的gu嵌入式运动控制平台系列产品等。
运动控制器应用场合的控制形式有:
点位运动控制
即仅对终点位置有要求,与运动的中间过程即运动轨迹无关。相应的运动控制器要求具有快速的定位速度,在运动的加速段和减速段,采用不同的加减速控制策略。在加速运动时,为了使系统能够快速加速到设定速度,往往提高系统增益和加大加速度,在减速的末段采用s 曲线减速的控制策略。为了防止系统到位后震动,规划到位后,又会适当减小系统的增益。所以,点位运动控制器往往具有在线可变控制参数和可变加减速曲线的能力。
连续轨迹运动控制
该控制又称为轮廓控制
控制系统电动 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)