四轴飞行器直流无刷电机驱动:反电势过零检测及程序
反电势检测出来后,就可以找到反电势的过零点,在反电势过零后延迟30°电角度进行换向操作。3 控制程序设计
3.1 驱动控制电路上电自检
无刷直流电机驱动控制部分包括MOSFET 自检、电机启动控制和电压电流监测功能3部分。驱动控制电路的上电自检流程如图3 所示,包括MOSFET 短路特性与导通特性测试、以防止过流损坏电路。
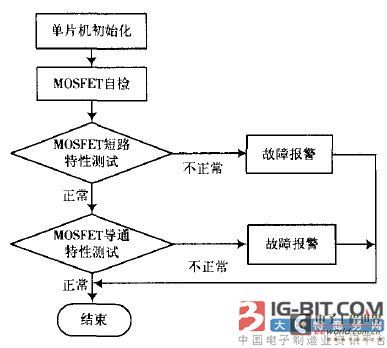
图3 驱动控制电路上电自检流程图
3.2 软件启动控制
反电势检测法只有在电机正常运转后才能进行,当电机不转或转速很低时,其反电势无法检测,因而采用软件启动的方式。针对无位置传感器无刷直流电机的控制,本文采用三步启动的方法,首先,给A,B相通电一段时间以固定电机转子位置;六状态轮流换向,通电时间逐步减少;检测第三相的反电势,若正常则启动成功,否则重新启动。具体的启动流程如图4所示。

图4 无刷无感直流电机启动流程
3.3 系统保护功能设计
四轴飞行器的系统保护功能包括电压、电流监测功能。电池电压监测功能电路:通过简单的分压电路将电池电压降到单片机A/D 转换允许的输入范围内(0~5 V),通过电压监测防止电压不足时电机停转;电流检测功能电路:通过0.01 Ω电阻采样电流,转化为电压,送到单片机的A/D转换口,以防止发生故障时大电流损坏电路。在电流监测时,采用简单的数值平均滤波方式,减弱瞬时峰值电流对测量结果的影响。
4 结语
本文实现四轴飞行器的直流无刷电机的驱动电路和系统控制软件程序设计。驱动电路采用三相六臂全桥电路,MOSFET 作为开关元件,利用ATmega 16 单片机作为控制芯片,反电势过零检测以及软件启动的控制方式,并延迟30°进行换向。正常启动后,单片机输出PWM 实现无刷直流电机转速调节。同时设计了电压、电流监测电路,保证系统安全,因而,该系统能够正常驱动无位置传感器无刷直流电机,并且能够应用于四轴飞行器。
四轴飞行器直流无刷电机驱动反电势过 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)