汽车局域网CAN总线详解
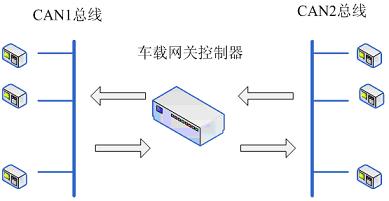
二、
1、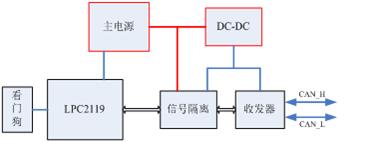
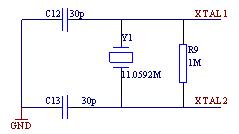
2、 硬件原理图
从以上可以看出,该硬件电路主要由三部分组成。
I、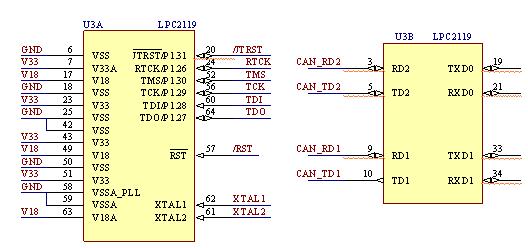
程序烧写口采用JTAG方式,比较方便在线调试。如图所示。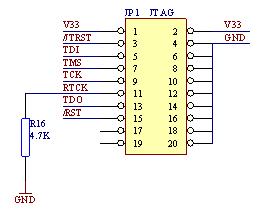
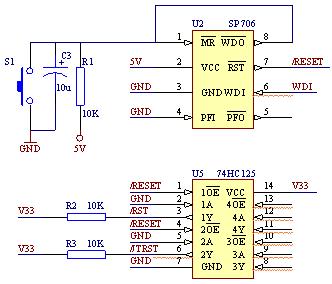
II、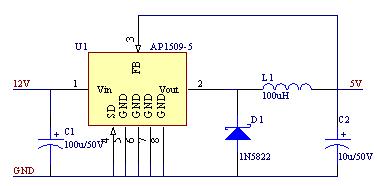
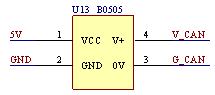
III、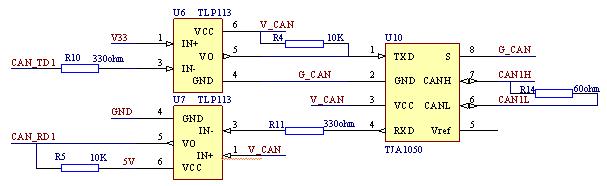
TLP113。CAN收发器芯片采用TJA1050,该芯片的主要特点有:
●
●
●
●
三、
主程序流程图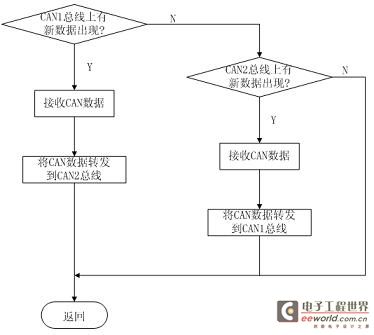
中断服务程序流程图
汽车局域网CAN总 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)