1.CAN总线是什么?
CAN(Controller Area Network)是ISO国际标准化的串行通信协议。广泛应用于汽车、船舶等。具有已经被大家认可的高性能和可靠性。
CAN控制器通过组成总线的2根线(CAN-H和CAN-L)的电位差来确定总线的电平,在任一时刻,总线上有2种电平:显性电平和隐性电平。
“显性”具有“优先”的意味,只要有一个单元输出显性电平,总线上即为显性电平,并且,“隐性”具有“包容”的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平。(显性电平比隐性电平更强)。
总线上执行逻辑上的线“与”时,显性电平的逻辑值为“0”,隐性电平为“1”。
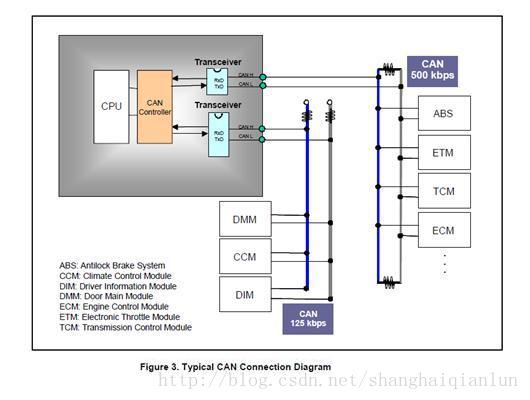
下图显示了一个典型的CAN拓扑连接图。
连接在总线上的所有单元都能够发送信息,如果有超过一个单元在同一时刻发送信息,有最高优先级的单元获得发送的资格,所有其它单元执行接收操作。
2.CAN总线的特点
CAN总线协议具有下面的特点:
1) 多主控制
当总线空闲时,连接到总线上的所有单元都可以启动发送信息,这就是所谓的多主控制的概念。
先占有总线的设备获得在总线上进行发送信息的资格。这就是所谓的CSMA/CR(Carrier Sense MultipleAccess/Collosion Avoidance)方法
如果多个设备同时开始发送信息,那么发送最高优先级ID消息的设备获得发送资格。
2) 信息的发送
在CAN协议中,所有发送的信息要满足预先定义的格式。当总线没有被占用的时候,连接在总线上的任何设备都能起动新信息的传输,如果两个或更多个设备在同时刻启动信息的传输,通过ID来决定优先级。ID并不是指明信息发送的目的地,而是指示信息的优先级。如果2个或者更多的设备在同一时刻启动信息的传输,在总线上按照信息所包含的ID的每一位来竞争,赢得竞争的设备(也就是具有最高优先级的信息)能够继续发送,而失败者则立刻停止发送并进入接收操作。因为总线上同一时刻只可能有一个发送者,而其它均处于接收状态,所以,并不需要在底层协议中定义地址的概念。
3) 系统的灵活性
连接到总线上的单元并没有类似地址这样的标识,所以,添加或去除一个设备,无需改变软件和硬件,或其它设备的应用层软件。
4) 通信速度
可以设置任何通讯速度,以适应网络规模。
对一个网络,所有单元必须有相同的通讯速度,如果不同,就会产生错误,并妨碍网络通讯,然而,不同网络间可以有不同的通讯速度。
5) 远程数据请求
可以通过发送“遥控帧”,请求其他单元发送数据。
6) 错误检测、错误通知、错误恢复功能
所有单元均可以检测出错误(错误检测功能)。
检测到错误的单元立刻同时通知其它所有的单元(错误通知功能)。如果一个单元发送信息时检测到一个错误,它会强制终止信息传输,并通知其它所有设备发生了错误,然后它会重传直到信息正常传输出去(错误恢复功能)。
7) 错误隔离
在CAN总线上有两种类型的错误:暂时性的错误(总线上的数据由于受到噪声的影响而暂时出错);持续性的错误(由于设备内部出错(如驱动器坏了、连接有问题等)而导致的)。CAN能够区别这两种类型,一方面降低常出错单元的通讯优先级以阻止对其它正常设备的影响,另一方面,如果是一种持续性的错误,将这个设备从总线上隔离开。
8) 连接
CAN总线允许多个设备同时连接到总线上且在逻辑上没有数目上的限制。然而由于延迟和负载能力的限制,实际可连接得设备还是有限制的,可以通过降低通讯速度来增加连接的设备个数。相反,如果连接的设备少,通讯的速度可以增加。
3.错误
3.1 错误状态
设备总是处于下面三个状态之一:
1)主动错误状态
在此状态下,设备能够参加总线上的正常通讯。如果处于主动错误状态的设备检测到一个错误,它会发送一个主动错误标志,更细节见第6章的“CAN协议”。
2)被动错误状态
是指易于引起错误的状态。
尽管处于被动错误状态的设备能够参加总线上的通讯,但是在接收期间,它不可能主动地向其它设备发送错误通知,以避免影响它们的通讯。处于被动错误状态的设备即使检测到一个错误,如果其它处于主动错误状态的设备没曾检测到错误,那么也认为在总线上未曾出现过任何错误。
当处于被动错误状态的设备检测到一个错误的时候,它发送一个被动错误标志。
另外,处于被动错误状态的单元在发送结束后不能立刻再次开始发送。在开始下次发送前,在间隔帧期间内必须插入“暂停发送期”(由8个位的隐性位组成)。
更细节见第6章的“CAN协议”。
3)总线切断状态
处于此状态下时,设备不能参加总线的通讯。设备所有的收发操作都被禁止。