CAN总线中主动错误和被动错误的通俗解释
时间:12-15
来源:互联网
点击:
2. 错误被动 (Error Passive) 3. 离线 (Bus Off) 故障界定状态机制中所含过程简述如下: 1. 节点保持对发送和接收错误计数器的跟踪; 3. 错误类型以及检出错误的结点被赋予不同的计数值,这些计数值将根据是发送还是接收错误进行累加。有效的接收及发送使这些计数器递减,直至最小值0; 4. 当这些计数器中的任何一个超出 CAN 定义的阈值时,该节点进入错误被动状态。在此状态下该节点将被认为是导致错误的原因; 5. 当发送错误计数值超出 CAN 定义的另一个阈值时,节点进入离线状态。本规范定义了从离线到错误主动之间的状态转换机制; 6. 当错误被动的节点的发送及接收错误计数器值都减小至CAN 定义的阈值以下时,节点重新进入错误主动状态。
2. 节点在开始错误主动状态时错误计数器的值等于0。该状态下的节点假设所有检测到的错误非该节点所为;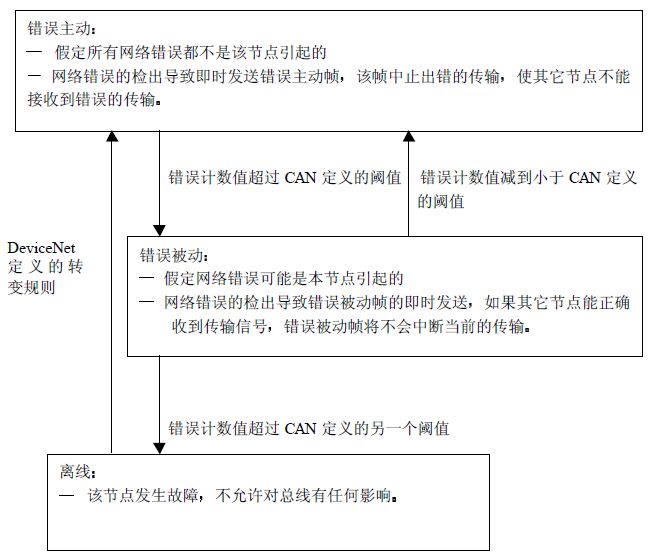
CAN总线主动错误被动错 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)