无刷直流电机控制器硬件设计和实现
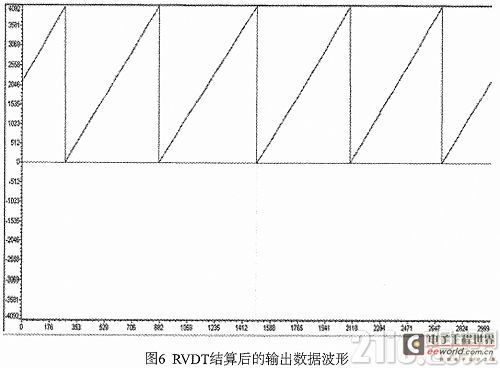
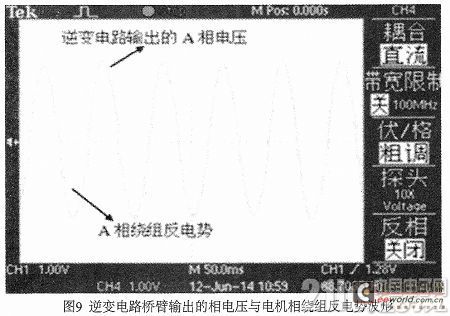
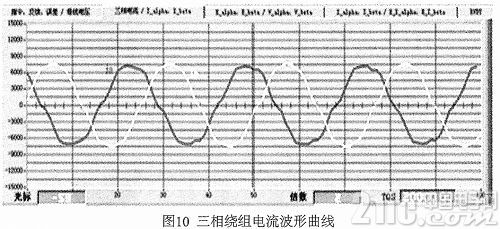
拉、下拉、高频滤波、增益设定、最大跟踪速率设定和闭环带宽等设定功能,设计严格参考相应的数据手册及相关软件进行选取,保证AD2S82能够可靠工作。 3 试验验证 3.1 旋变解算试验 图5为无刷电机匀速旋转时旋转变压器(RVDT)的激励信号、正弦输出信号和余弦输出信号的测试波形,从图中可以看出两路输出信号正交,输出信号与激励信号过零点重合,未出现相位偏移现象。输出信号经旋变结算芯片AD2S82A解算输出12位数字量(0~8191对应转子位置角度0~360°),DSP使用数据总线在PWM中断程序中连续4次读取RVDT的解算信号如图6所示。以上分析可知,RVDT解算电路实现了无刷电机转子位置的解算,能够准确的反映电机转子的实际位置,为电机调速控制提高可靠的硬件基础。 3.2 PWM驱动试验 主控DSP输出的PWM信号为控制系统中的关键控制信号之一,控制IPM中IGBT的导通和关断,根据调压调速的原理调节无刷电机转速。 IPM上下桥臂IGBT采取互补模式工作,当上下桥臂IGBT的开关状态发生翻转时,为防止发生直通而导致短路,必须在PWM信号发生翻转时设置死区时间;本文设定的死区时间为1μs,PWM死区时间测定波形如图7所示。两相上下桥臂IGBT开关控制波形如图8所示,采用中心对称模式的PWM控制,斩波频率为15kHz时,电机绕组电压通断频率为PWM斩波频率的两倍,即为30kHz,可有效减小无刷电机的转矩脉动。 由于功率逆变电路采用三相全桥逆变拓扑结构,为保证电机出力最大,功率逆变电路桥臂输出的电压应与对应的无刷直流电机绕组反电动势保持适当的相位关系。图 9是对电机转子位置信号值进行软件调整后、功率逆变电路输出的A相电压与无刷直流电机A相绕组的反电势波形,两者过零点对齐,逆变电路桥臂输出的电压波形接近正弦波,满足采用PWM方式驱动无刷直流电机的供电要求。 3.3 三相绕组电流测试 图10为无刷电机正常运行过程中,上位机调试平台观测到的两相绕组电流波形ia、ib(ic=-ia-ib为减少数据量,ic未进行显示)。为方便调试,DSP定时将需要观察的变量上传到上位机调试平台,调试平台把上传的数据绘制成曲线。图中纵坐标为信号幅值对应的A/D转换值,横坐标为上传点数。试验表明电流采样电路能够真实的反映电机绕组实际电流值,硬件设计合理。 4 结论 本文是基于双TMS320F2812 DSP处理器为核心,进行无刷直流电机控制器硬件设计,利用主控DSP进行系统实时控制、利用监控DSP对系统状态进行全面监控,以提高系统运行可靠性。对核心硬件电路进行试验,结果表明控制器硬件电路设计能够为软件设计提供可靠的平台。 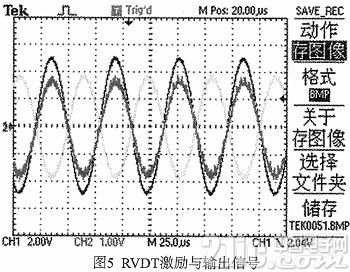

双DSP无刷直流电机IGBT旋转变压 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)