在PSoC4平台上开发传感器BLDC电机控制系统
时间:12-15
来源:互联网
点击:
外部的运放电路,速度慢,成本较高且不可靠。此外,对霍尔传感器失效的硬件检测缺乏实时有效的手段,影响电机的安全运行。
4.基于PSoC4的无刷直流电机控制架构及优势分析
PSoC4采用的ARM Cortex-M0高性能处理核心不仅能够快速完成电机的闭环速度调节和其它相应的控制运算,其内部集成的可编程UDB可以将图2所示的换相逻辑以CPLD的形式固化在芯片中,实现更快速可靠的硬件换相,无须软件干涉;此外,UDB更可以直接检测霍尔信号的失效状态,并立即关断PWM输出,迅速保护电机。
PSoC4内部集成有支持比较器模式的运算放大器(Opamp)和可编程IDAC电流源,因此对电机电流的监控也可以完全集成到PSoC4片内完成,而不需要任何外部有源器件。电机电流经采样电阻后进入片内Opamp,放大后作为片内比较器的正端输入,比较器的负端输入为片内IDAC电流源产生的过流阈值基准。比较器输出的跳变将直接关断PWM输出,保护电机。
5. 基于PSoC4 的无刷直流电机控制系统设计实例
① 控制原理图设计
依据图4的控制框图,我们设计了图5所示的在PSoC Creator环境下的BLDC电机控制原理图。
霍尔信号经I/O引脚后直接输入UDB换相逻辑表LUT_Cmut直接驱动三相全桥电路,完成电机的硬件换相。同时霍尔信号也同步输入另一个UDB逻辑表LUT_Spd,实现霍尔传感器的失效状态检测并完成电机的速度检测。
电机电流经采样电路后输入片内运放Opamp_1,经运放和滤波后输入片内比较器,与片内IDAC产生的过流阈值基准进行比较,反转后将直接关断PWM输出,通过换相逻辑表LUT_Cmut来使电机断电。
由于采用了PSoC4片内硬件进行换相、霍尔失效检测和过流检测保护,因此系统的的软件设计较为简捷,只需读取用户命令和完成速度闭环调节等即可。
控制主程序首先初始化和配置PSoC4的内部资源,在主循环中首先检测用户的起停命令和速度给定,在执行速度闭环PI调节。最后检测母线电压状态。
③ 控制系统实验结果
完成系统前述的系统原理图和程序设计后,在PSoC Creator环境下编译BLDC电机控制工程,并连接PSoC4开发板,三相全桥驱动板与BLDC电机,通电后电机可正常运行。图7显示电机运行在4000RPM时的霍尔信号与三相绕组反电动势波形。通道1,2,3分别为相绕组A,B,C反电动势波形。
由图可以看出,BLDC电机运行稳定,反电动势为标准的梯形波。
本文主要介绍了如何在Cypress推出的PSoC家族的最新成员PSoC4平台上开发有传感器BLDC电机控制系统。本文的设计过程说明,PSoC4片内集成的丰富资源使BLDC电机的换相和霍尔失效检测都可以由内部硬件来完成,简化了控制系统的软件设计并提高了可靠性。此外,片内集成的运放和比较器将电流检测和保护也放在芯片内部完成,使过流检测反应速度更快并进一步降低了成本。因此,用户可以使用PSoC4设计出具有优异性能和较低价格的有传感器BLDC电机控制系统和产品。(end)
4.基于PSoC4的无刷直流电机控制架构及优势分析
PSoC4采用的ARM Cortex-M0高性能处理核心不仅能够快速完成电机的闭环速度调节和其它相应的控制运算,其内部集成的可编程UDB可以将图2所示的换相逻辑以CPLD的形式固化在芯片中,实现更快速可靠的硬件换相,无须软件干涉;此外,UDB更可以直接检测霍尔信号的失效状态,并立即关断PWM输出,迅速保护电机。
PSoC4内部集成有支持比较器模式的运算放大器(Opamp)和可编程IDAC电流源,因此对电机电流的监控也可以完全集成到PSoC4片内完成,而不需要任何外部有源器件。电机电流经采样电阻后进入片内Opamp,放大后作为片内比较器的正端输入,比较器的负端输入为片内IDAC电流源产生的过流阈值基准。比较器输出的跳变将直接关断PWM输出,保护电机。
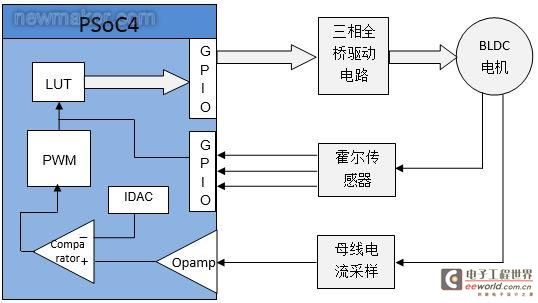
图4:基于PSoC4的无刷直流电机控制框图
5. 基于PSoC4 的无刷直流电机控制系统设计实例
① 控制原理图设计
依据图4的控制框图,我们设计了图5所示的在PSoC Creator环境下的BLDC电机控制原理图。
霍尔信号经I/O引脚后直接输入UDB换相逻辑表LUT_Cmut直接驱动三相全桥电路,完成电机的硬件换相。同时霍尔信号也同步输入另一个UDB逻辑表LUT_Spd,实现霍尔传感器的失效状态检测并完成电机的速度检测。
电机电流经采样电路后输入片内运放Opamp_1,经运放和滤波后输入片内比较器,与片内IDAC产生的过流阈值基准进行比较,反转后将直接关断PWM输出,通过换相逻辑表LUT_Cmut来使电机断电。
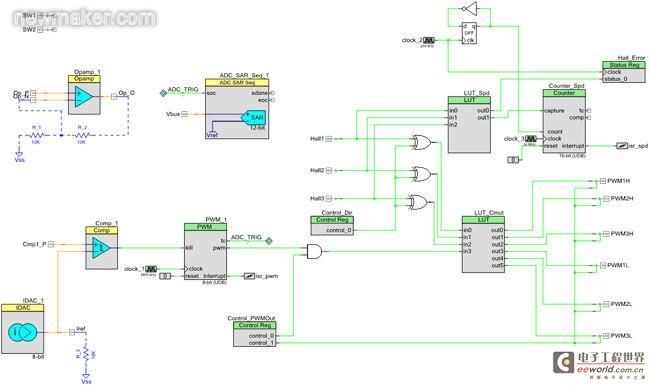
图5:步进电机控制原理图
由于采用了PSoC4片内硬件进行换相、霍尔失效检测和过流检测保护,因此系统的的软件设计较为简捷,只需读取用户命令和完成速度闭环调节等即可。
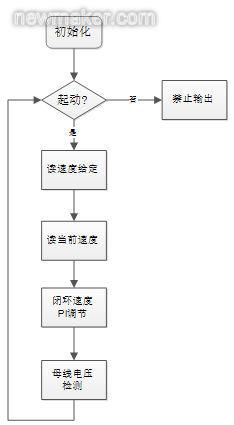
图6:主程序流程图
控制主程序首先初始化和配置PSoC4的内部资源,在主循环中首先检测用户的起停命令和速度给定,在执行速度闭环PI调节。最后检测母线电压状态。
③ 控制系统实验结果
完成系统前述的系统原理图和程序设计后,在PSoC Creator环境下编译BLDC电机控制工程,并连接PSoC4开发板,三相全桥驱动板与BLDC电机,通电后电机可正常运行。图7显示电机运行在4000RPM时的霍尔信号与三相绕组反电动势波形。通道1,2,3分别为相绕组A,B,C反电动势波形。
由图可以看出,BLDC电机运行稳定,反电动势为标准的梯形波。
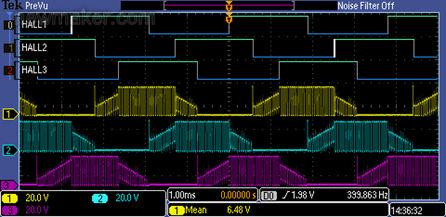
图7: 三相霍尔信号与绕组反电动势波形
本文主要介绍了如何在Cypress推出的PSoC家族的最新成员PSoC4平台上开发有传感器BLDC电机控制系统。本文的设计过程说明,PSoC4片内集成的丰富资源使BLDC电机的换相和霍尔失效检测都可以由内部硬件来完成,简化了控制系统的软件设计并提高了可靠性。此外,片内集成的运放和比较器将电流检测和保护也放在芯片内部完成,使过流检测反应速度更快并进一步降低了成本。因此,用户可以使用PSoC4设计出具有优异性能和较低价格的有传感器BLDC电机控制系统和产品。(end)
PSoC4平台传感器BLDC电机控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)