三维扫描仪:机器视觉简介
时间:12-15
来源:互联网
点击:
三维扫描仪的计算机视觉(也称计算机视觉)是指用摄像机和计算机代替人眼对目标进行识别、跟踪和测量等,它是人工智能领域最热门的研究课题之一,它和专家系统、自然语言理解已成为人工智能领域最活跃的三大领域。尽管它还没有形成完整的理论体系,在很多方面它解决问题的方法还是一种技巧,但它是实现工业生产高度自动化、机器人智能化、自主车导航、目标跟踪,以及各种工业检测、医疗和军事应用的核心内容之一,也是实现智能机器人的关键因素之一,它的发展不仅将大大推动智能系统的发展,也将拓宽计算机与各种智能机器的研究范围和应用领域。
三维扫描仪机器视觉是研究用计算机来模拟生物外显或宏观视觉功能的科学和技术。机器视觉系统的首要目标是用图像创建或恢复现实世界模型,然后认知现实世界。机器视觉系统获取的场景图像一般是灰度图像,即三维场景在二维平面上的投影。此时,场景三维信息只能通过灰度图像或灰度图像序列来恢复处理,这种恢复需要进行多点对一点的映射逆变换。在信息恢复过程中,还需要有关的场景知识和投影几何知识。
三维扫描仪机器视觉是一个相当新且发展十分迅速的研究领域,并成为计算机科学的重要研究研究领域之一。机器视觉是在20 世纪50 年代从统计模式识别开始的,当时的工作主要集中在二维图像分析和识别上,如光学字符识别、工件表面、显微图片和航空图片的分析和解释等。60 年代,Roberts (1965)通过计算机程序从数字图像中提取出诸如立方体、楔形体、棱柱体等多面体的三维结构,并对物体形状及物体的空间关系进行描述。Roberts 的研究工作开创了以理解三维场景为目的的三维机器视觉的研究。Roberts对积木世界的创造性研究给人们以极大的启发,许多人相信,一旦由白色积木玩具组成的三维世界可以被理解,则可以推广到理解更复杂的三维场景。于是,人们对积木世界进行了深入的研究。研究的范围从边缘、角点等待征提取,到线条、平面、曲面等几何要素分析,—直到图像明暗、纹理、运动以及成像几何等,并建立了各种数据结构和推理规则。到了70 年代,已经出现了一些视觉应用系统。
70 年代中期,麻省理工学院(MIT)人工智能(AI)实验室正式开设“机器视觉”(Machine Vision)课程,由国际著名学者B.K.P.Horn 教授讲授.同时,MIT AI实验室吸引了国际上许多知名学者参与机器视觉的理论、算法、系统设计的研究。David Marr 教授就是其中的一位。他于1973 年应邀在MIT AI 实验室领导一个以博士生为主体的研究小组,1977 年提出了不同于“积木世界”分析方法的计算视觉(computational vision)理论,该理论在80 年代成为机器视觉研究领域中的一个十分重要的理论框架。
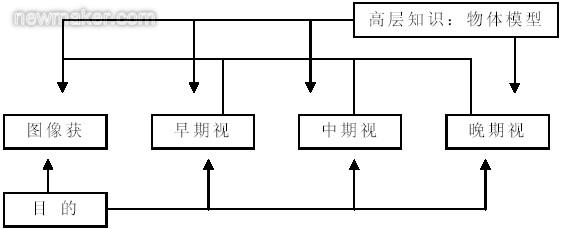
Marr 视觉计算理论立足于计算机科学,系统地概括了心理生理学、神经生理学等方面业已取得的所有重要成果。是三维扫描仪视觉研究中迄今为止最为完善的视觉理论。Marr建立的视觉计算理论,使计算机视觉研究有了一个比较明确的体系,并大大推动了计算机视觉研究的发展。人们普遍认为,计算机视觉这门学科的形成与Marr 的视觉理论有着密切的关系。Marr 视觉计算理论将整个视觉过程所要完成的任务分成三个过程,而获得这些表示的过程依次称为初级视觉、中级视觉和高级视觉,如图1 所示。
三维扫描仪机器视觉是研究用计算机来模拟生物外显或宏观视觉功能的科学和技术。机器视觉系统的首要目标是用图像创建或恢复现实世界模型,然后认知现实世界。机器视觉系统获取的场景图像一般是灰度图像,即三维场景在二维平面上的投影。此时,场景三维信息只能通过灰度图像或灰度图像序列来恢复处理,这种恢复需要进行多点对一点的映射逆变换。在信息恢复过程中,还需要有关的场景知识和投影几何知识。
三维扫描仪机器视觉是一个相当新且发展十分迅速的研究领域,并成为计算机科学的重要研究研究领域之一。机器视觉是在20 世纪50 年代从统计模式识别开始的,当时的工作主要集中在二维图像分析和识别上,如光学字符识别、工件表面、显微图片和航空图片的分析和解释等。60 年代,Roberts (1965)通过计算机程序从数字图像中提取出诸如立方体、楔形体、棱柱体等多面体的三维结构,并对物体形状及物体的空间关系进行描述。Roberts 的研究工作开创了以理解三维场景为目的的三维机器视觉的研究。Roberts对积木世界的创造性研究给人们以极大的启发,许多人相信,一旦由白色积木玩具组成的三维世界可以被理解,则可以推广到理解更复杂的三维场景。于是,人们对积木世界进行了深入的研究。研究的范围从边缘、角点等待征提取,到线条、平面、曲面等几何要素分析,—直到图像明暗、纹理、运动以及成像几何等,并建立了各种数据结构和推理规则。到了70 年代,已经出现了一些视觉应用系统。
70 年代中期,麻省理工学院(MIT)人工智能(AI)实验室正式开设“机器视觉”(Machine Vision)课程,由国际著名学者B.K.P.Horn 教授讲授.同时,MIT AI实验室吸引了国际上许多知名学者参与机器视觉的理论、算法、系统设计的研究。David Marr 教授就是其中的一位。他于1973 年应邀在MIT AI 实验室领导一个以博士生为主体的研究小组,1977 年提出了不同于“积木世界”分析方法的计算视觉(computational vision)理论,该理论在80 年代成为机器视觉研究领域中的一个十分重要的理论框架。
Marr 视觉计算理论立足于计算机科学,系统地概括了心理生理学、神经生理学等方面业已取得的所有重要成果。是三维扫描仪视觉研究中迄今为止最为完善的视觉理论。Marr建立的视觉计算理论,使计算机视觉研究有了一个比较明确的体系,并大大推动了计算机视觉研究的发展。人们普遍认为,计算机视觉这门学科的形成与Marr 的视觉理论有着密切的关系。Marr 视觉计算理论将整个视觉过程所要完成的任务分成三个过程,而获得这些表示的过程依次称为初级视觉、中级视觉和高级视觉,如图1 所示。

Marr 视觉过程中的三个阶段
补充的Marr 理论框架同时,在扩充的理论框架中,引入了三维扫描仪主动视觉的研究方法,在研究中重视了对定性、有目的的视觉等的研究[。比如,基于感知特征群的物体识别理论框架、主动视觉理论框架、视觉集成理论框架等。到目前为止,机器视觉仍然是一个非常活跃的研究领域。许多会议论文集都反映了该领域的最新进展,比如,国际计算机视觉与模式识别会议(InternationalConference on Computer Vision and Pattern Recognition,CVPR);国际计算机视觉会议(InternationalConference on Computer Vision ,ICCV) ; 国际模式识别会议(International Conference on Pattern Recognition, ICPP);国际机器人学与自动化会议(International Conference on Robotics and Automation,ICRA);计算机视觉研讨会(Workshop on
三维扫描仪机器视 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)