电机控制线路图大全
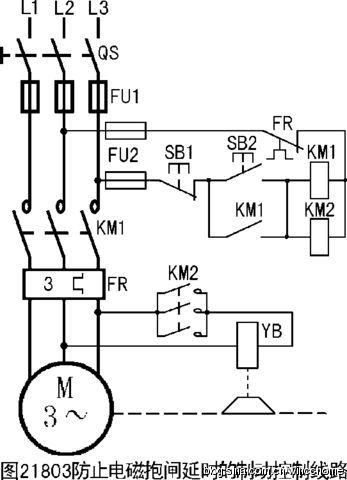
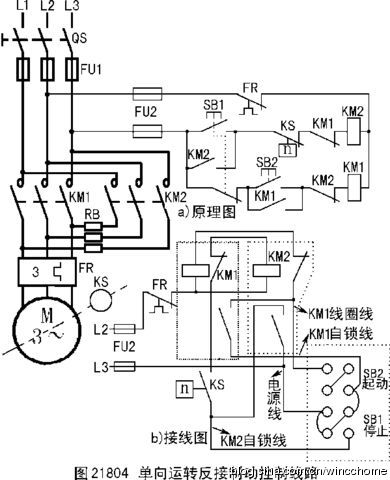
利用机械装置,使电动机迅速停转的方法,经常采用的机械制动设备是电磁抱闸,电闸抱闸的外形结构如图21801所示。 电磁抱闸主要由两部分构成:制动电磁铁和闸瓦制动器。制动电磁铁由铁芯和线圈组成;线圈有的采用三相电源,有的采用单相电源;闸瓦制动器包括:闸瓦,闸轮,杠杆和弹簧等。闸轮与电动机装在同一根转轴上. 制动强度可通过调整弹簧力来改变。 一)电磁抱闸制动控制线路之一 电磁抱闸制动控制线路之一如图21802所示: 电磁抱闸制动控制线路的工作原理简述如下: 接通电源开关QS后,按起动按钮SB2,接触器KM线圈获电工作并自锁。电磁抱闸YB线圈获电,吸引衔铁(动铁芯),使动、静铁芯吸合,动铁芯克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,取消对电动机的制动;与此同时,电动机获电起动至正常运转。当需要停车时,按停止按钮SB1,接触器KM断电释放,电动机的电源被切断的同时,电磁抱闸的线圈也失电,衔铁被释放,在弹簧拉力的作用下,使闸瓦紧紧抱住闸轮,电动机被制动,迅速停止转动。 电磁抱闸制动,在起重机械上被广泛应用。当重物吊到一定高度, 如果线路突然发生故障或停电时,电动机断电,电磁抱闸线圈也断电,闸瓦立即抱住闸轮使电动机迅速制动停转,从而防止了重物突然落下而发生事故。 二)电磁抱闸制动控制线路之二 采用图21802控制线路,有时会因制动电磁铁的延时释放,造成制动失灵。 造成制动电磁铁延时的主要原因:制动电磁铁线圈并接在电动机引出线上(参见图2-71)。电动机电源切断后,电动机不会立即停止转动,它要因惯性而继续转动。由于转子剩磁的存在,使电动机处于发电运行状态,定子绕组的感应电势加在电磁抱闸YB线圈上。所以当电动机主回路电源被切断后,YB线圈不会立即断电释放,而是在YB线圈的供电电流小到不能使动、静铁芯维持吸合时,才开始释放。 解决上述问题的简单方法是;在线圈YB的供电回路中串入接触器KM的常开触头。如果辅助常开触头容量不够时,可选用具有五个主触头的接触器。或另外增加一个接触器,将后增加接触器的线圈与原接触器线圈并联。将其主触头串入YB的线圈回路中。这样可使电磁抱闸YB的线圈与电动机主回路同时断电,消除了YB的延时释放。 防止电磁抱闸延时的制动控制线路如图21803所示。 二、电力制动 常用的电力制动有电源反接制动和能耗制动两种。 一)电源反接制动 电源反接制动是依靠改变电动机定子绕组的电源相序,而迫使电动机迅速停转的一种方法。 (一)单向反接制动控制线路 单向运转反接制动控制线路如图21804所示。 图中KS—1和KS—2分别为速度继电器正反两个方向的两副常开触头,当按下SB2时,电动机正转,速度继电器的常开触头KS—2闭合,为反接制动作准备,当按下SB3时,电动机反转,速度继电器KS—1闭合,为反接制动作准备。中间继电器KA的作用是:为了防止当操作人员因工作需要而用手转动工件和主轴时,电动机带动速度继电器KS也旋转;当转速达到一定值时,速度继电器的常开触头闭合,电动机获得反向电源而反向冲动,造成工伤事故。 图21805控制线路的工作原理,简述如下: 闭合电源开关QS后按SB2,接触器KM1获电闭合并通过其自锁触头自锁,电动机M正转起动,当电动机转速高于120转/每分钟时,KS—2闭合,为反接制动作准备。 当需要正转停止时,按SB1,接触器KM1断电释放而中间继电器KA获电吸合并自锁;KA的常开触头断开,切断KM2自锁触头的供电回路,使其不能自锁;KA的常开触头接通KM2的线圈回路,使KM2获电吸合,此时反接制动开始,当电动机的转速降至约100转/每分钟时,速度继电器KS—2断开,使 KM2断电释放,在中间继电器自锁回路中的常开触头KM2断开,使中间继电器KA也失电释放。 可逆起动反接制动的控制线路之一的参考接线步骤如下: (1)首先接好电源FU2及热继电器FR常闭触头,引出控制电源“1”与“2”。 (2)将电源“1”接至三个线圈的一端。接触器KM1与KM2的线圈空闲端分别接至对方的常闭触头;从KM1、KM2的两个空常闭触头各引出一长一短两根线,其中两根短线接至对方的常开触头,两根长线为两个接触器各自的线圈线,其中从KM2常闭引出的长线为“KM1的线圈线”,接至SB2左侧常开接点;从KM2常闭引出的长线为“KM2的线圈线”,接至SB3左侧常开接点。 (3) 将KM1、KM2刚接过线的常开触头的空接点,与KA的常闭触头用导线连接,并引出一根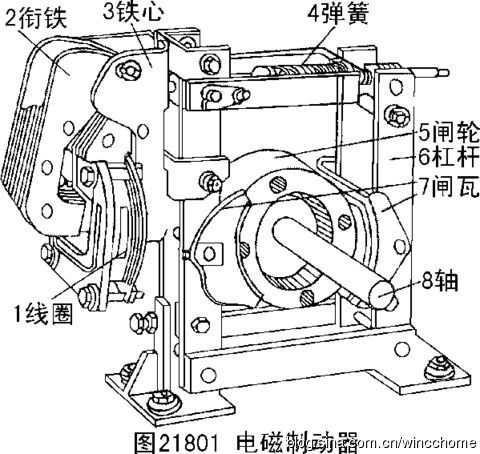


电机控制线路 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)