可编程控制器的组成

图5 I/O模块的外部接线方式
汇点式模块的各I/O电路有一个公共点,所有I/O点共用一个电源。
分组式模块的I/O点分为若干个组,每一组的各I/O电路有一个公共点,它们共用一个电源。各组之间是分隔开的,可分别使用不同的电源。
分隔式模块的各I/O点之间相互隔离,每一I/O点都可以使用单独的电源,将它们的COM端连接起来,几点可以使用同一个电源。
5、输入模块
输入电路中设有RC滤波电路,以防止由于输入触点抖动或外部干扰脉冲引起错误的输入信号。滤波电路延迟时间的典型值为10~20ms(信号上升沿)和20~50ms(信号下降沿),输入电流约5~10mA.

图6 直流输入电路
图6是某直流输入模块的内部电路和外部接线图。在本节输入电路和输出电路中一般只画出了一路,COM是各路的公共点。图中的输入触点直接在公共点和输入端X001之间,不需要外接输入回路的电源,有的可编程序控制器还可以为接近开关、光电开关之类的传感器提供24V电源(见图6)。
当图6中的外接触点接通时,光电耦合器中的发光二极管亮,光敏三极管饱和导通;外接触点断开时,光电耦合器中的发光二极管熄灭,光敏三极管截止,信号经内部电路传送给CPU模块。
开关量输入模块外接电子传感器的输出信号时,应注意传感器的输出电路与可编程序控制器输入电路的配合,对于图6中输入模块的内部电路,传感器的输出电路应为NPN管集电极开路的共发射极电路。
图7是另一种交流输入电路,光电耦合器中有两个反并联的发光二极管,显示用的两个发光二极管也是反并联的,所以这个电路可以接收外部的交流输入电压。
图8所示的交流/直流输入电路的输入触点的接通后,输入信号被滤波和整流,交流电压或直流电压被转换为直流电流,送给显示用的发光二极管和光电耦合器。

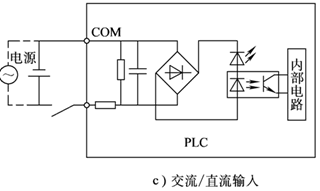
图7 交流输入电路 图8 交流/直流输入电路
6、输出模块
输出模块的功率放大元件有驱动直流负载的大功率晶体管和场效应管、驱动交流负载的双向可控硅,以及既可以驱动交流负载又可以驱动直流负载的小型继电器。输出电流的典型值为0.5~2A,负载电源由外部现场提供。
输出电流的额定值与负载的性质有关,例如某模块可以驱动AC220V/2A的电阻性负载,但是只能驱动80VA/AC220V的电感性负载和100W的白炽灯。额定输出电流还与温度有关,温度升高时额定输出电流减小,有的可编程序控制器提供了有关的曲线。
输出模块内可能设置有熔断器,并在模块面板上用发光二极管显示熔断的状态。某些新式的模块用非破坏性的电子保护电路代替熔断器。
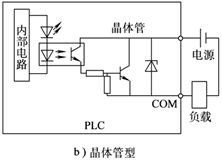
图9(a)是继电器输出电路,继电器同时起隔离和功率放大作用,每一路只给用户提供一对常开触点。与触点并联的RC电路和压敏电阻用来消除断开时产生的电弧。
图9(b)是晶体管集电极输出电路。输出信号送给内部电路中的输出储存器,再经光电耦合器送给输出晶体管,后者的饱和导通状态和截止状态相当于触点的接通和断开。图中的稳压管用来抑制关断过电压和外部的浪涌电压,以保护晶体管,晶体管输出电路的延迟时间〈1ms。
c) 双向可控硅型
图9PLC的输出电路
图9(c)是双向可控制硅输出电路,它用光电可控硅实现隔离。图中的 RC电路和压敏电阻,用来抑制可控硅的关断过电压和外部的浪涌电压。
双向可控硅由关断变为导通的延迟时间小于1ms,由导通变为关断的延迟时间小于10ms。可控硅在负载电流过小不能导通,遇到这种情况时可以在负载两端并用电阻。
除了输入模块和输出模块,还有一种既有输入电路又有输出电路的模块,输入、输出的点数一般相同,这种模块使用户确定可编程序控制器、的硬件配置更为方便。
7、本地I/O和远程I/O
1.本地I/O
可编程序控制器的本地I/O框架一般距CPU框架很近,它们往往装在同一个控制柜内。对于单台机械设备,如中小型机床,一般只有本地I/O。本地I/O用多芯电缆(一般是扁平电缆)实现扩展I/O框架与CPU框架之间的通信。扁平电缆可能多达数十根导线,信息是并行传送的,这种通信方式实际上是总线通信的扩展,其主要优点是数据传输速度快,在某些情况下可以同步地刷新CPU模块中的I/O映象表。“本地“(Local)这一名词不是很确切的,因为有时本地I/O与CPU模块的距离可能长达数百m。(http://www.diangon.com/版权所有)本地I/O模块的主要特征是框架之间采用并行通信方式,通常用编程器可以直接对本地I/O存取数据,对系统调试和查错特别方便。但是多芯电缆价格很贵,对于改造旧设备,电缆的安装(如穿管)可能不是很方便。
2.远程I/O
远程I/O又叫做串行I/O,用于远距离分布式框架系统。某些大型可编程序控制器控制系统,如物资存储自动控制系统,可能有成百上千个传感器分布在很宽的范围内,系统可能包括30—50个距离分布的框架,每个框架中有10—20块模块。远程I/O系统一船只需要4根导线的电缆来连接各框架,但是大多数系统需要专用的I/O驱动顺模块和接收器模块来完成框架之间的串行通信。远程通信使用便宜的4芯电缆,其传送速度虽比并行通信的低,但是已能满足工业控制系统的要求。CPU框架与远程I/O框架之间的距离一般为60~3000m。
可编程控制器CPU模块编程 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)