LMS Test Lab在整车路面载荷提取中的运用
时间:12-19
来源:互联网
点击:
1 前言
随着汽车产业的迅猛发展,汽车的乘坐舒适性能如噪声和振动常常成为区分汽车好坏最为直接的重要因素之一。乘用车低频噪声问题一直是目前设计和控制的难点,路面噪声通常可以分为两类,一是轮胎与路面相互作用直接辐射进车内的噪声,称为直接路面噪声;二是由于路面激励,通过悬架系统引起车身振动而产生的结构辐射噪声,称为间接路面噪声。由路面激励引起的结构噪声已成为现代汽车日益关注的焦点。
汽车受路面激励力的作用,通过不同的传递路径引起车身结构的振动,从而向车内辐射大量噪声。为了有效的控制和分析路面噪声,通常需要进行路面噪声传递路径分析,可以通过传递路径试验分析,也可以通过CAE仿真分析,以确定每条路径对目标点(车内噪声)的贡献量,从而为汽车低噪声产品设计和控制提供强有力的指导方案。目前CAE仿真已成为解决NVH最为便利和快捷的分析方法,为了确保分析结果的准确度,在进行CAE仿真过程中,需尽可能的采用与实际相近的输入条件。通常需要结合试验测量分析方法来获取激励力,从而保证输入条件的真实性。针对轮胎噪声仿真分析,通常需要悬架与车身接点处的激励力,加载于整车有限元分析模型,进行结构噪声分析。
2 基本思想
通常进行路面载荷提取的试验及求取流程如下图所示:
在对试验工况数据进行主分量分析后,可以建立传递路径分析模型,在分析模型中提取激励力。激励力的获取方法主要有直接测量法、动态复刚度法、逆矩阵法及激励点反演法四种。如果主动方和受动方是刚性连接或者弹性连接但弹性元件的刚度相对于主、受动双方的局部刚度较大,耦合元件的变形相对于其周围结构的变形不够大,就不适合使用动态复刚度法测量耦合激励力,因此本次试验采用矩阵求逆法。为了避免矩阵奇异值分解时产生数值分解问题,并使估计出的耦合激励力更加精确, 应使参考自由度数不小于耦合激励力数(传递路径数)。
在使用矩阵求逆法时还应注意:参考自由度须取在被动方,尽量分布在耦合点附近。测量传递函数时,主动方应在各耦合点处与受动方解耦并从耦合点移走,以消除激励源耦合的影响。
3 试验测量及分析过程
3.1 试验条件及准备
试验通常分两部分:
一、工况数据测量:测量车辆在实际工况下各指示点的振动加速度及目标点的声压。试验路面为粗糙路面,路面四周空旷,背景噪声应比被测噪声低15dB(A)以上。本次试验时,车辆从60km/h 进入粗糙路面后空档滑行至40km/h,记录该车速区域内各指示点的振动加速度及车内目标点的声压时间历程。
二、传递函数测量:测量各个传递路径到目标点的振—声传递函数(全局传函),以及传递路径激励力到各个指示点间的加速度响应传递函数(局部传函)。试验前拆除车辆悬架主动端部分(车轮总成),将车辆用软橡皮绳吊挂,使车辆处于自由状态。采用力锤单点激励多点响应的方法进行传递函数测量,试验中需要必要的辅助夹具,便于敲击及传感器安装。
测点安装与布置:指示点选在悬架系统被动端链接处,每个接点处布置两个及两个以上的三向加速度传感器;目标点布置于车内驾驶员及乘员外耳处(靠近车窗侧)。测点布置及安装示意图如下图所示:
在进行传递路径载荷提取前,首先要检查试验数据,通常运用工作变形分析(ODS)来检查试验数据的一致性,以此来判断试验数据是否可取。另外通过工作变形分析还可以及时了解和分析结构(如前副车架和后托架)的动态特性。
在确认了试验数据之后,在LMS Test Lab Multi-Reference Post Processing模块中进行多参考点分析,获得指示点与目标点间的互功率谱函数。继而在LMS Test Lab Principal Component Analysis模块中进行主分量分析(PCA),目的是将耦合的多参考问题转换为非耦合的单参考问题,从而将问题简化后得以求解。经过主分量分析后的试验结果如下图所示:
随着汽车产业的迅猛发展,汽车的乘坐舒适性能如噪声和振动常常成为区分汽车好坏最为直接的重要因素之一。乘用车低频噪声问题一直是目前设计和控制的难点,路面噪声通常可以分为两类,一是轮胎与路面相互作用直接辐射进车内的噪声,称为直接路面噪声;二是由于路面激励,通过悬架系统引起车身振动而产生的结构辐射噪声,称为间接路面噪声。由路面激励引起的结构噪声已成为现代汽车日益关注的焦点。
汽车受路面激励力的作用,通过不同的传递路径引起车身结构的振动,从而向车内辐射大量噪声。为了有效的控制和分析路面噪声,通常需要进行路面噪声传递路径分析,可以通过传递路径试验分析,也可以通过CAE仿真分析,以确定每条路径对目标点(车内噪声)的贡献量,从而为汽车低噪声产品设计和控制提供强有力的指导方案。目前CAE仿真已成为解决NVH最为便利和快捷的分析方法,为了确保分析结果的准确度,在进行CAE仿真过程中,需尽可能的采用与实际相近的输入条件。通常需要结合试验测量分析方法来获取激励力,从而保证输入条件的真实性。针对轮胎噪声仿真分析,通常需要悬架与车身接点处的激励力,加载于整车有限元分析模型,进行结构噪声分析。
2 基本思想
通常进行路面载荷提取的试验及求取流程如下图所示:
图1 路面载荷提取流程图
在对试验工况数据进行主分量分析后,可以建立传递路径分析模型,在分析模型中提取激励力。激励力的获取方法主要有直接测量法、动态复刚度法、逆矩阵法及激励点反演法四种。如果主动方和受动方是刚性连接或者弹性连接但弹性元件的刚度相对于主、受动双方的局部刚度较大,耦合元件的变形相对于其周围结构的变形不够大,就不适合使用动态复刚度法测量耦合激励力,因此本次试验采用矩阵求逆法。为了避免矩阵奇异值分解时产生数值分解问题,并使估计出的耦合激励力更加精确, 应使参考自由度数不小于耦合激励力数(传递路径数)。

在使用矩阵求逆法时还应注意:参考自由度须取在被动方,尽量分布在耦合点附近。测量传递函数时,主动方应在各耦合点处与受动方解耦并从耦合点移走,以消除激励源耦合的影响。
3 试验测量及分析过程
3.1 试验条件及准备
试验通常分两部分:
一、工况数据测量:测量车辆在实际工况下各指示点的振动加速度及目标点的声压。试验路面为粗糙路面,路面四周空旷,背景噪声应比被测噪声低15dB(A)以上。本次试验时,车辆从60km/h 进入粗糙路面后空档滑行至40km/h,记录该车速区域内各指示点的振动加速度及车内目标点的声压时间历程。
二、传递函数测量:测量各个传递路径到目标点的振—声传递函数(全局传函),以及传递路径激励力到各个指示点间的加速度响应传递函数(局部传函)。试验前拆除车辆悬架主动端部分(车轮总成),将车辆用软橡皮绳吊挂,使车辆处于自由状态。采用力锤单点激励多点响应的方法进行传递函数测量,试验中需要必要的辅助夹具,便于敲击及传感器安装。
测点安装与布置:指示点选在悬架系统被动端链接处,每个接点处布置两个及两个以上的三向加速度传感器;目标点布置于车内驾驶员及乘员外耳处(靠近车窗侧)。测点布置及安装示意图如下图所示:

图2 指示点布置及安装示意图

图3 传递函数测点时敲击点示意图
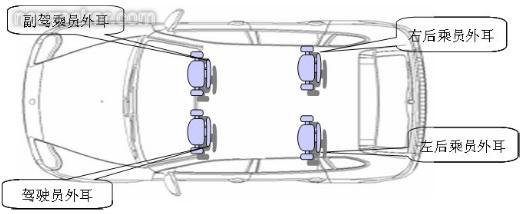
图4 车内目标点布置及安装示意图
在进行传递路径载荷提取前,首先要检查试验数据,通常运用工作变形分析(ODS)来检查试验数据的一致性,以此来判断试验数据是否可取。另外通过工作变形分析还可以及时了解和分析结构(如前副车架和后托架)的动态特性。
在确认了试验数据之后,在LMS Test Lab Multi-Reference Post Processing模块中进行多参考点分析,获得指示点与目标点间的互功率谱函数。继而在LMS Test Lab Principal Component Analysis模块中进行主分量分析(PCA),目的是将耦合的多参考问题转换为非耦合的单参考问题,从而将问题简化后得以求解。经过主分量分析后的试验结果如下图所示:
图5 主分量分析结果图从上图5的主分量分析结果中可以看出,车内
LMSTestLab整车路面载荷提 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)