PLC控制系统硬件设计方法
◆ 控制系统总体方案设计
◆ 控制系统硬件设计根据
◆ 机型及I/O模块的选择
◆ 控制系统硬件设计文件
◆ 系统供电设计
◆ I/O模块供电电源设计
◆ 系统接地设计
◆ 电缆设计和敷设
(一)控制系统总体方案设计
明确对控制对象的要求,然后根据实际需要确定控制系统类型和系统工作时的运行方式,即总体方案的实际内容。
1、PLC控制系统类型
由PLC构成的单机控制系统可分为下列四种类型。
(1)由PLC构成的单机控制系统
(2)由PLC构成的集中控制系统
(3)由PLC构成的分布式控制系统
(4)由PLC构成远程I/O控制系统


图1PLC控制系统
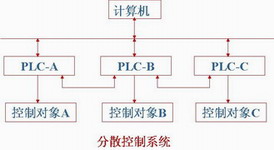

图2 PLC控制系统
2、系统的运行方式
用PLC构成的控制系统有三种运行方式,即自动、半自动和手动。
(1)自动运行方式。自动运行方式是控制系统的主要运行方式。这种运行方式的主要特点是在系统工作过程中,系统按给定的程序自动完成被控对象的动作,不需要人工干预,系统的启动可由PLC本身的启动系统进行,也可由PLC发出启动信号,由操作人员确认并按下启动响应按钮后,PLC自动启动系统。
(2)半自动运行方式。这种运行方式的特点是系统在启动和运行过程中的某些步骤需要人工干预才能进行下去。半自动方式多用于检测手段不完善,需要人工判断或某些设备不具备自控条件,需要人工干涉的场合。
(3)手动运行方式。手动运行方式不是控制系统的主要运行方式,而是用于设备调试、系统调整和特殊情况下的运行方式,因此它是自动运行方式的辅助方式。
3、PLC的停运方式
有正常停运、暂时停运和紧急停运三种。
(1)正常停运。 由PLC的程序执行,当系统的运行步骤执行完且不需要重新启动执行程序时,或PLC接收到操作人员的停运指令后,PLC按规定的停运步骤停止系统运行。
(2)暂停方式。用于程序控制方式时暂停执行当前程序,使所有输出都设置成OFF状态,待暂停解除时将继续执行被暂停的程序。另外也可用暂停开关直接切断负荷电源,同时将此信息传给PLC,以停止执行程序,或者把CPU的RUN切换成STOP,以实现对系统的暂停运行。
(3)紧急停运方式。是在系统运行过程中设备出现异常情况或故障时,若不中断系统运行,将导致重大事故或有可能损坏设备,此时必须使用紧急停运按钮使整个系统立即停运。它是既没有连锁条件也没有延迟时间的停运方式,紧急停运时,所有设备都必须停运,且程序控制被解除,控制内容复位到原始状态。
(二)系统硬件设计根据
系统硬件设计必须根据控制对象而定,应包括控制对象的工艺要求、设备状况、控制功能、I/O点数,并据此构成比较先进的控制系统。
1、工艺要求
机械手的控制系统为例,讨论工艺要求所包含的内容和对系统设计的要求。所要了解的工艺过程如下图所示。
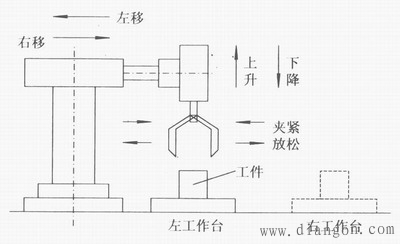
图3 机械手动作示意图
2、设备状况
设备状况应满足整个工艺要求。
3、控制功能
根据工艺要求和设备状况就可提出控制系统应实现的控制功能。只有掌握了要实现的控制功能,才能据此设计系统的类型、规模、机型、模块、软件等内容。
4、I/O点数和种类
在统计系统I/O时,要分清输入和输出、数字量和模拟量、各种电压电流等级、智能模板要求。
5、系统的先进性
◆ 初级的单体设备控制系统
◆ 集中控制系统
◆ EIC综合化控制系统
EIC综合化系统就是将电气控制(Electric)、仪表控制(Instrumentation)、计算机系统(Computer System)集于一体形成综合化控制系统。这种系统功能强、层次清楚、可靠性高、可扩展性强、应用开发容易。鉴于控制思想的不断更新,在设计可编程序控制器所组成的控制系统时,也要考虑到所组成的控制方案的先进性。
(三)PLC的机型选择
选择机型所依据的性能指标如下:
1、CPU的能力(存储容量、扩展能力、驱动能力等)
2、I/O点数:为保证所设计的控制系统的正常运行,在系统硬件设计时,建议根据实际I/0点数留有10% ~15%的余量。
3、响应速度
4、指令系统
5、机型选择的其它考虑
◆ 性能价格比
◆ 备品备件的统一考虑
◆ 技术支持等
6、是否在线编程:在线编程要求主机和编程器各有一个CPU。
(四)输入/输出模块的选择
1、 数字量输入模块的选择
(1)选择电压等级:按电压分有直流5V、12V、24V、 48V、60V和交流110V、220V;
(2)按保护形式分:有隔离和不隔离两种
(3)选择模块密度:按点数分有8点、16点、32点、64点。
高密度模块,如 32点或64点,同时接通点数取决于输入电压和环境温度。一般来讲,同时接通点数最好不超过模块总点数的70%。
(4)备用输入点的设计考虑
在设计总输入点数时都留有了一定的余量,这些备用点的分配应分别考
PLC控制系统硬件设 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)