KincoCAN总线解决方案在自动锁付设备上的应用
考虑到整个通讯距离较远,因此将系统的总线波特率设置为500K/s,下面介绍一下PDO的配置: 2)画面编程: 七、结束语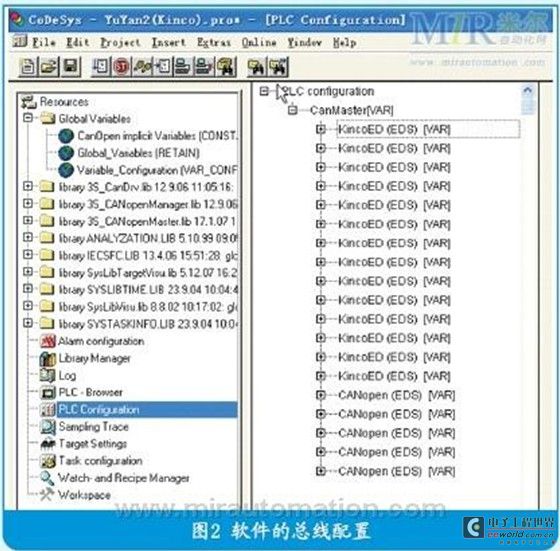
--伺服接收PDO:控制字、控制模式、目标速度、最大速度、目标位置、seq_add
--伺服发送PDO:状态字、错误代码、实际位置、实际电流。
2、MT6000的CoDeSys编程
CoDesys可以通过IL-指令表,LD-梯形图,FBD功能块,SFC顺序功能图,ST结构化文本以及CFC联系功能图进行编程。
由于CoDeSys是一个软PLC,因此要选择步科的硬件平台StepServo ARM windows CE,这样才能确保MT6000的接口可以正常使用;
硬件主站配置好以后,需要在软件中加入CAN的库函数,在库管理目录下添加3S_CANopenMaster.lib库函数,否则主站没有报文发出。
1)系统控制编程及功能简述:
系统控制程序主要包括:上电初始化,总线初始化,找原点(由伺服的Seqence完成,MT6000直接调用),手动,自动,故障处理等子程序;
--上电初始化:伺服初始化,上电锁轴,托举气缸在低位;
--总线初始化:启动各从站;
--找原点:调用伺服内部的程序,用34模式来回原点,这样螺丝深入多少,可以从当前位置读出,以判断螺丝深入深度。
--手动:在面板上设定单个轴的工作方式;
--自动:托举气缸到位后,锁付气缸动作,锁付伺服启动,由速度模式让螺丝与套筒套好,传感器检测到位后,用位置模式将伺螺丝推入螺丝孔处,位置到达后用力矩模块来实现锁付;锁付完成后自动判定是否合格,锁付电机停止,锁付气缸复位,托举气缸复位,一个锁付过程完成。
--故障处理:故障显示及复位;
--系统的主程序如下:
CoDeSys的可视化编辑器,是CoDeSys编程系统的一部分,它提供了一种图形化的元素,这种元素可以和工程项目中的变量链接并能按照需要进行安排,它的功能及编辑方式和普通的人机界面功能类似。
图4是一个手动运行的主画面
步科的CANopen总线解决方案再一次为多轴系统用户排忧解难,同时也表明MT6000人机界面产品通过CANopen总线实现多轴系统控制的优越性。
MT6000通过CAN总线连接伺服驱动器,远程I/O模块、变频器、智能仪表、智能从站等设备,把采集的这些设备的信号通过CAN总线传输给MT6000,经过内部处理后,MT6000再通过CAN总线把这些数据传送给现场设备。CAN采用短帧结构,数据传输时间短,抗干扰能力强。自动锁付系统自运行至今,系统的稳定可靠性良好。当前全国各地尤其是沿海地区出现了民工荒,有的工厂高薪也很难招到合适的操作人员,所以自动化设备将是保证工厂生产力的有力保证。我们相信,随着社会的逐步发展,自动化产品的应用会逐步增强,越来越多的应用于各行各业。
KincoCAN总线自动锁付设 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)