汽车车牌定位识别完整设计
一个,并去除不包含车牌区域的伪扫描窗口。
图像RAM:用来保存从视频采集模块接收到的图像数据和缩放以后的图像数据。图像RAM有两个写端口和一个读端口,写端口用于向RAM中写入原始图像数据和缩放以后的图像数据;读端口用于向后继处理模块输出图像数据。
帧存RAM:用来保存从视频采集模块接收到的图像数据、车牌位置信息和车牌号码信息。
Casecade_ROM:用来保存训练得到的Adboost分类器数据(特征向量),包括Haar特征中矩形的位置、大小、权重、阈值、分类器阈值等信息。
分类器读取单元:它从分类器ROM中读出分类器数据,向扫描窗口流水线提供矩形位置、大小、权重、阈值、分类器阈值等信息
2.3 技术特点
(1)基于Adboost算法的车牌检测硬件架构设计;
(2)针对640x480彩色图像,定位时间<40ms。
(3)固定环境下,车牌定位识别率99%
3. 技术路线
本设计采用45x15的阵列架构,通过流水线可快速计算矩形灰度和。硬件结构如图7所示。其中白色45x15个方块表示当前检测窗口的行积分,每个单元存放的是在当前所在的行中该像素点之前的像素值之和。横线填充的方块存放的是矩形位置数据和权重,竖线填充的方块存放的是部分灰度和,这两部分构成的特征矢量流水线每时钟周期流动一次,而行积分阵列(白色方块)构成的流水线仅在当前窗口检测完毕流动一次,载入新的被检数据。图像数据和分类器数据分别保存在图像RAM和分类器ROM当中。行积分逻辑由一个加法器和45个寄存器构成,每45个时钟周期计算出一行像素的行积分,并输出到检测阵列。分类器检测逻辑接收上一级计算出的矩形灰度和,计算其特征值和相似度,并累加所有的相似度,并与阈值进行比较,判断是否通过该级分类器。扫描控制逻辑生成图像RAM的读地址,控制检测窗口对当前图像进行扫描,扫描完毕后,将当前图像大小乘以3/4,重新扫描,直到被检图像与检测窗口大小一致,则完成一幅图像的检测。
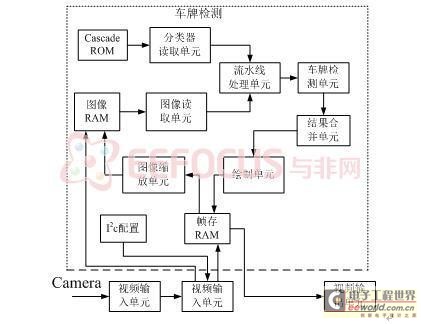
图7 基于Adboost的车牌检测并行算法的架构
AdaboostFPGA车牌定位Haar特 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)