基于图像的机器人视觉伺服实验研究
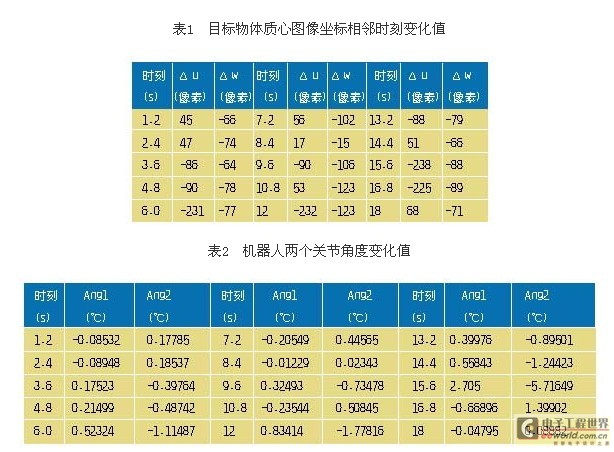
位置值等进行实时显示,并存储相关数据。通过调用pmac动态链接库函数,实现与pmac卡的通讯。增益矩阵为对角矩阵,用来设置关节角度变化的放大比例。程序设置了两个定时器,一个用于采集两个关节的实际位置值,另一个用于定时接收串口数据值、计算雅可比矩阵、与pmac卡通讯等,也即为系统的伺服周期。 本实验利用两个时刻的像素误差作为控制量,来验证视觉伺服算法是否正确和上述系统是否实际可行。通过设置关节1、关节2的初始角度分别为0和0.2弧度,期望像素值u和w分别为200和110,实际像素u和w初始值分别为95和150,矩阵增益1和2分别为0.06和0.05,pmac卡采集时间设定为100ms,伺服周期设定为1.2s。下面两表是根据以上设置进行实验的一组数据。表1是物体质心图像坐标两相邻时刻的变化值,表2是由程序计算出的机器人两个关节角度变化值。 根据以上数据运用originpro软件绘制的图形如下:图7是图像坐标两相邻时刻的变化值曲线,图8是机器人两个关节角度变化值曲线。 在实验中,根据目标物体图像坐标像素的变化,得到机器人关节转动角度的变化,通过pmac卡和松下交流伺服系统的作用实现了机器人的视觉伺服运动。从上述两表和两图可看出,图像坐标的变化和机器人关节角度值的变化是一种非常复杂的非线性关系,这也从另一方面证实了图像雅可比矩阵的非线性关系和求解困难性。从公式(5)可看出,图像雅可比矩阵既跟当前时刻的像素值有关,还与摄像机的相关参数、机器人的相关参数和关节的角度值有关,是一个时时刻刻都随这些量的变化而变化的矩阵,因而其非线性非常严重,求解也非常困难,本文中假定了机器人的转动角度初始值,才使得求解稍容易一点。本实验只是基于图像的机器人视觉伺服实验研究的起始阶段实验,其效果并不太理想。本文系统的摄像头是运动的,目标物体是不动的,所处理的图像是动态视频图像,这就对dsp系统和视频图像处理方法提出了较高要求;因而图像处理算法还有待进一步改进和开发,并脱离dsp仿真环境下载到系统中运行,也有待于对整个系统的伺服算法做更深入的研究。 结语 本文分析了机器人视觉伺服系统的基本原理,采用基于图像的视觉伺服方法,绕过三维空间重建和坐标变换,建立了机器人视觉伺服系统的数学模型,并应用到实际机器人系统中来。组建了由工控机、pmac运动控制卡、松下交流伺服系统、dsp图像处理系统和两杆平面机器人组成的视觉伺服机器人系统,在对各子系统深入研究的基础上,开发了pmac运动程序、dsp图像处理程序和工控机主控程序,在实际机器人系统中初步实现了视觉伺服控制,系统能根据目标物体质心图像坐标值的变化,求解出机器人两关节应运动的角度值,并控制机器人按相应角度值运动,实现视觉伺服。实验结果表明,系统初步实现了基于图像的机器人视觉伺服在实际机器人系统中的实现。本实验只是该课题的起始阶段实验,其效果也不理想,下一步将对整个系统进行更深入的研究。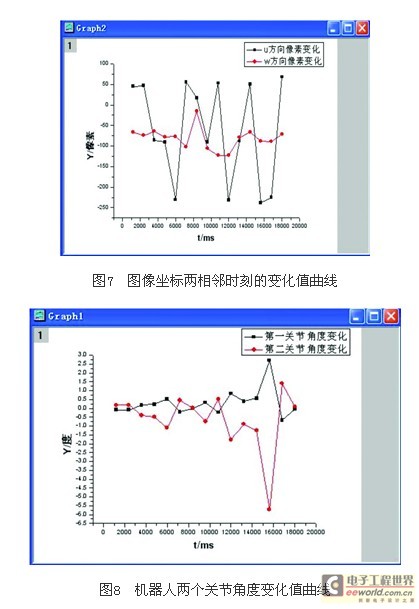
机器人视觉伺服实验研 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)