基于现场总线技术的工业控制系统研究
1 现场总线技术简介
在现场工业控制技术中,现场总线技术作为一项先进技术,是一种串行、数字式、多点通信的数据总线。工作实践中,在生产过程区域的现场设备/仪表和控制室内自动控制装置/系统之间广泛安装现场总线。借助现场总线实现信息的相互交换,进而自动控制功能在一定程度上也得以完成,现场总线往往是从控制室连接到现场设备的双向全数字通信总线。
2 现场总线的通信协议
如图 1 所示,给出了现场总线相应的物理结构。与开放式互连(OSI)参考模型相比,现场总线的物理结构只涉及到物理层、数据链路层和应用层,并且每个协议层各自完成功能,在这些层之间报文被解析。在数据链路实体中,物理层建立、维护和拆除相应的物理连接。
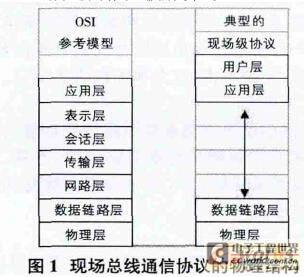

确保数据的完整性这是数据链路层的主要功能,何时与谁进行相应的对话等也是通过数据链路层来决定的,并且数据链路层不解释传输的数据,只负责传递物理层和上一层之间数据传。
应用层通常分为两个子层,其中一个为用户层提供服务,另一个与数据链路层进行连接,其功能主要表现为:对现场总线的命令、响应、数据、以及事件信息等进行控制。在应用层之上就是用户层,通常情况下,用户层通常是一些数据和信息查询软件等,通过用户层将通信命令传送到应用层。
3 现场总线及其所构成的控制系统
3.1 常见现场总线的比较
①基金会现场总线 FF。在过程自动化领域基金会现场总线 FF 应用较为广泛,可以说基金会现场总线技术具有较好的发展前景。②CAN 总线。对于 CAN 总线来说支持点对点、一点对多点,以及广播模式通信等,并且借助优先级设定其节点,在一定程度上各节点可以随时发送信息。在汽车内部测量,以及执行部件之间的数据通信协议中,该总线技术应用最早。③Lonworks 总线。具备通信和控制功能的 Neuron 芯片是 Lonworks 技术的核心。完整的Lonworks 的 LonTalk 通信协议通过 Neuron 芯片来实现。④PROFIBUS 总线。该总线主要包括:PROFIBUS—FMS、PROFIBUS—DP、PROFIBUS—PA。⑤HART 总线。该总线作为一种协议,其功能是在现场智能仪表和控制室设备之间进行相应的通信,在现有模拟信号传输线上实现数字信号通信这是 HART 总线的特点。
3.2 现场总线控制系统的构成
通常情况下,测量系统、控制系统、管理系统共同构成现场总线控制系统,该系统最有特色的部分是通信部分的硬件和软件。
①测量系统。为多变量提供高性能的测量,使测量仪表在一定程度上具有计算能力等这是该系统的特点所在。在该系统中,因为使用了数字信号,所以在一定程度上其分辨率非常高,准确性也较高,并且具有较强的抗干扰和抗畸变能力。②控制系统。通常情况下,软件是该系统的重要组成部分,维护软件、组态软件、仿真软件等共同构成控制系统的软件。③管理系统。设备自身及过程的诊断信息、管理信息、设备运行状态信息等往往由该系统提供。
4 现场总线在工业控制系统中的应用
通常情况下,CAN 是一种双向、半双工的高速串行通信网络系统,该系统由物理层 (PHY)、数据链路层(MAC;LLC)和应用层(APPL)共同构成组成。CAN 与 Profibus 之间相距比较远。
如图 2 所示,给出了相应的 CAN 网络拓扑结构。根据ISO11898 的相关规定,在信息传输媒介方面,CAN 采用双铰线,在网络终端阻抗方面,CAN 取 120Ω±12Ω。传输速率通常情况下决定着最大直接通信距离,比较典型的值为:40m 时 1Mbps;1000m 时 50kbps。
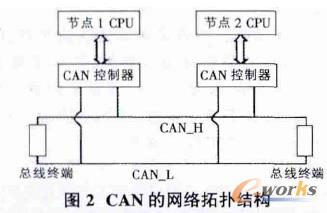
CAN 采用非破坏性总线仲裁技术,对媒体按照节点信息的优先级依次进行访问,在一定程度上满足实时控制的需要。信息帧传输过程中为短帧结构,其优点是传输时间短,具有较强的抗干扰能力。文献[7]结合 PLC 和液压控制技术,建立了基于 CAN 总线的多任务协同控制系统。
5 结论
现场总线是当今自动化领域技术发展的热点之一,随着计算机技术和控制技术的发展,未来的自动化控制领域将是现场总线及控制网络的天下。从长远看,使用现场总线技术,维护费用因智能资产管理而降低,进而减少了设备的库存。
现场总线工业控制系统通信协议CAN总 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)