一种基于以太网技术的涂料生产远程监控系统
1 引言
随着科学技术的发展,基于以太网、计算机(PC)、可编程控制器(PLC)、人机界面(HumanComputer Interface,HMI)、智能仪表的自动化已成为现代工厂的技术支柱。与传统的基于现场总线的工业控制网络体系相比,工业以太网具有通信速率高、成本低廉、资源共享能力强、可持续发展潜力大等优势。
我国涂料行业生产线的自动化程度相对落后,随着涂料行业的技术改造和新建项目中计算机技术的广泛应用,采用PLC控制取代了继电器控制;工艺流程的人机界面动态显示取代了模拟显示;PC机与以太网技术使整个生产线处于远程控制和管理下,从而彻底改变了传统涂料行业生产的落后面貌。
本系统主要研究由PC、PLC和HMI组成的远程控制系统在涂料生产线的应用。从工艺流程的控制要求人手,对涂料生产线综合分析,通过PLC编程实现基本控制要求,通过触摸屏设计一套人性化、简单化的人机界面,再通过现场调试对工艺参数进行调整。上位机监控软件采用北京亚控科技发展有限公司的“组态王6.53”组态软件,设计了工艺流程图显示、动态数据画面显示、报表显示、报警显示等功能,实现对生产的过程监控及数据处理。通过以太网,管理者可以远程监控整个生产过程,定时查看生产数据,从而最终满足控制和管理要求。
2 工艺流程简介
涂料生产包括基料配对、配料、兑稀、包装、入库等环节。总体工艺流程如图1所示。涂料生产工艺流程是:将胶料和助剂混合,并进行低速搅拌;将颜填料、助剂和水混合后进行高速分散,必要时进行研磨制成白浆;把白浆分批慢速加入到乳液中,形成初涂料;用增稠剂调整初涂料的粘稠度,用色浆调配初涂料的颜色及其深浅度,或再加入消泡剂即为乳胶漆成品,经过滤、称量、包装、检验合格后就可入库或上市销售。
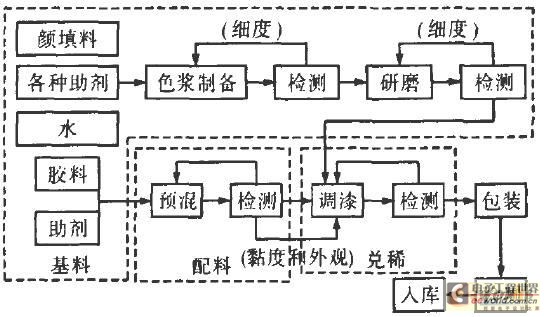
图1 总体工艺流程图
3 控制系统结构设计
根据工艺流程和生产要求,涂料生产过程控制中最重要的是对各种物料进出量实现精确控制。生产所用的物料都存放在物料罐中,每次用料量都很大。由于现场条件的限制,无法直接采用重量传感器来计量。而且从节约成本出发,采用质量流量计也不经济。因此,本系统中采用液位变送器检测物料罐中物料液位的变化,利用罐的截面积得到进出物料量的体积,再利用该物料的密度就可得到进出物料的量。同时,该远程控制系统还要求具有以下功能:
(1)对整个工艺流程实现自动检测和控制;
(2)以组态王6.53web为技术平台,实时显示系统的监控画面;
(3)通过以太网通讯,实现不同楼层的人机界面资料共享以及生产的远程监测;
(4)生产过程自动控制中具有多重安全措施;
(5)实现“现场无人值班,控制室少人操作”的目标,减轻操作人员的工作量和劳动强度,并加强对操作人员的监督和管理。
整个系统分为四层:现场控制级、PLC控制站、上位计算机监控系统和远程监控系统。系统结构如图2所示。
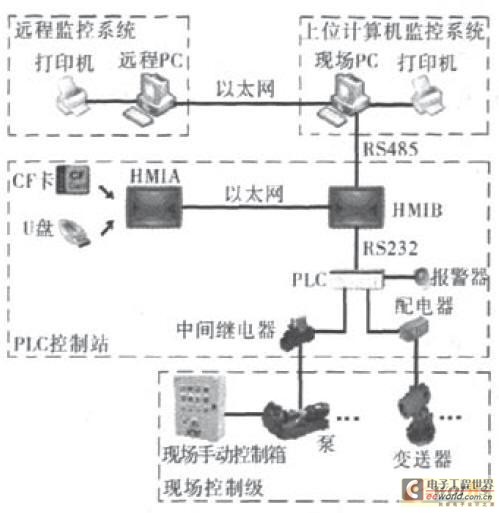
图2 系统结构图
3.1现场控制级
现场控制级主要有两部分功能:一是对现场的生产进行手动操作;二是现场的液位变送器与PLC连接,将物料量的变化信号传送到PLC,PLC输出控制泵,从而实现进出物料量的自动控制。
3.2 PLC控制站
PLC控制站由可编程控制器、触摸屏、配电器、中间继电器和报警器等组成。
本系统中可编程控制器采用欧姆龙公司CPIH,主要完成对现场设备相关模拟量和开关量的数据状态采集及输出控制。触摸屏采用威纶通公司的MT8000。触摸屏与PLC配套使用,使得PLC的应用更加灵活。触摸屏可以设置参数、显示数据、以动画等形式描绘生产过程,使得PLC的应用可视化。采用RS232接口将触摸屏与PLC通过通信电缆进行连接。远程触摸屏(HMI A)和本地触摸屏(HMI B)通过以太网连接,二者均可显示仪表数据和设备状态,都能对现场设备进行控制。
3.3上位计算机监控系统
上位计算机监控系统既能完成系统的组态、调试,检测参数的在线修正和控制参数的设置,又能实现对生产数据的采集,报表的生成和打印,异常信号的报警及生产现场信息的网络发布等功能。利用组态王6.53的web功能,上位监控计算机同时作为系统的web服务器,组态王工程可通过web服务器完成web发布。
3.4远程监控系统
远程监控系统指厂长室通过以太网与现场PC相连,操作人员可以随时随地通过以太网和IE浏览器实施远程监控。
4 控制系统软件设计
4.1 PLC控制系统设计
PLC控制系统运行流程如图3所示。PLC控制分手动、自动控制两种,系统一般使用自动控制,手动控制主要在系统检修或参数调试时使用。现场手动控制是由用户在现场通过手动操作按钮决定各执行机构的输出状态,现场手动控制具
以太网人机界面组态王远程监 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)