PROFIBUS—DP总线在气动物流生产线中的应用
工件的高度,高度合格的毛坯通过一个滑道被送到加工单元,而不合格的毛坯被剔除,并送到检测单元的毛坯废品仓。 (3)加工单元由4工位回转工作台(包括:上料、加工、检测和下料工位)、钻孔、夹紧和检测装置构成。回转工作台由电机驱动,通过电感式接近开关,来确定工作台的回转位置。夹紧气缸在钻孔过程中央夹紧工件,防止松动。加工后的工件在检测工位进行钻孔尺寸的检查,这是确保工件加工质量的必要措施。 (4)提取单元根据工件加工的合格与否,将加工后的工件分别送至分拣单元的传送带上或加工废品仓。 (5)分拣单元对检测合格的工件按其特征属性进行分类并送到不同滑道中。每个滑道的仓门由小气缸驱动,根据工件在检测单元检测的结果,不同的仓门开闭实现工件成品的自动分类码放。 4 物流生产线控制系统的硬件组态及软件编程 调试与检验PROFIBUS—DP总线系统前必须组建总线网络,并进行网络组态。通常的网络组态方法有两种:一种是基于组态软件(如:wINcC)+主站卡(如:CP5613)构成的PROFIBUS-DP二类主站的网络结构,另一种是由具有PROFIBUSDP接口的硬件PLC构成的PROFIBUS—DP一类主站结构,本文调试所采用的就是前一种方式,其网络结构如图1所示。 计算机运行SIMATIC.NET V6.2软件包进行PROFIBUS—DP总线网络的硬件组态,组态过程包括:(1)通过Configur—Station加载CP5613通信卡建立网络的主站;(2)通过HW—Configuration组态整个PROFIBUS—DP总线网络,组态好的界面如图3所示,组态信息下载到主站中即可。从而构成了基于PROFIBUS—DP现场总线的分布式控制系统。各个控制单元的PLC通过STEP7软件在计算机中进行相应参数设置,如通信端口的设置、MPI地址设定、选择数据传输速率等,然后对S7-300进行硬件组态,即对S7—300的机架、电源、CPU、信号模块等按其实际配置类型和物理地址进行组态,其中在CPU的组态中设置总线地址,并将组态信息通过编程通信电缆下载到PLC并进行确认。依次完成各PLC的组态后,便构成了PROFIBUS—DP总线网络。 控制系统的PLC程序是采用S7系列PLC的软件包STEP?V5.2设计开发而成。程序设计采用结构化编程,应用组织块(OB)、功能块(FB)、功能(FC)及数据块(DB)组成对MPS系统的控制系统程序。STEP7 V5.2界面友好,编程方便,在线调试便捷,具有梯形图(LAD)、语句表(STL)和功能图(FBD)三种编程形式并可随意切换和组合使用。STEP7中有许多固定的系统功能(SFC),其中SFCl4和SFCl5分别用于通过PRORBUS—DP总线读/写I/O设备参数。 5 结束语 本文叙述的基于PROFIBUS—DP现场总线的分布式控制系统经过调试,实现了监控计算机与各个单元PLC之间的正常通信,通过编写PLC的测试程序,实现了气动物流生产线的自动控制,检查了整体方案的可行性;验证了整个系统信息传递及控制的可靠性、准确性和实时性。该气动物流生产线系统模拟实际工业生产中大量复杂控制过程,采用模块化概念设计构造,灵活性强,适合于机电一体化人才的综合能力培养。 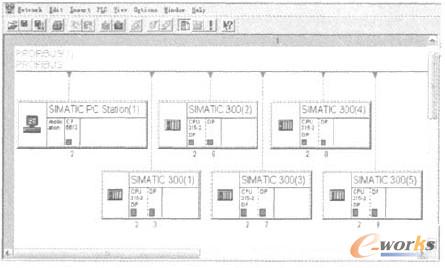

图3物流生产线控制系统的网络组态界面
PROFIBUS—DP总线气动物流生产 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)