CAN总线在混合动力汽车中的应用研究
部分。为了保证总线通信的实时性,减少总线通信的通信量和负载,需要合理的调度方式。为了实现系统控制目标,在通信协议中定义了事件触发、定时发送和应答响应3种调度方式,分别调度非周期实时性消息、周期实时性消息、周期非实时性消息、非周期非实时性消息以及查询消息。在定时发送的调度方式中,按照控制系统对其实时性要求的高低,依次设定了10、50、100、200、500ms的时间间隔。如动力总成控制器发送给电机的扭矩控制指令,由于实时性要求较高,采用了10ms更新一个数据,而实时性相对较低的量(如电池组的电气状态)则采用了100ms发送一次。为了发挥CAN系统中远程帧(由节点发送,以请求发送具有相同标识符的数据帧)的优势,还采用了应答响应的调度方式,如协议中电池单体模块状态信息,如果要每个电池单体模块状态信息都传输的话,必将带来总线的负载的增加,同时从控制角度来看,也没有这样的必要,因此,采用了远程请求的方式来传输。图2是CAN信息发送流程图,图3是CAN信息中断接收流程图。
2.5故障诊断及处理
系统运行时的故障和处理主要由各ECU来处理,并向CAN总线发送信息。具体为:电机故障主要由电机控制器来监测,然后通过CAN总线发送到网络上,主控制器接收故障信息并判断是否为重大故障,如是重大故障则采取相应措施,切断主继电器,动力电池停止供屯如果是一般故障则采取相应的策略排除故障;电池故障由电池管理系统监测,并向网络发送信息,主控制器收到故障信息后,作相应处理,故障也分一般故障和重大故障。CAN总线通信是XL2000混合动力轿车控制的纽带,总线通信的故障主要是总线节点脱离,或是负载过高导致严重事故,所以要随时监控电机控制器、电池管理系统的节点状态和总线的负载。如果节点脱离,则需要停车重启控制系统;若是负载过高,则报警。
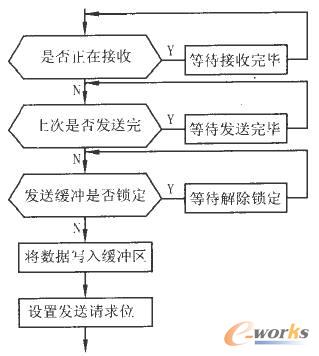
图2 CAN发送流程图
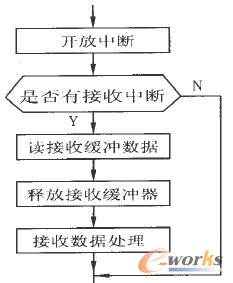
图3 CAN接收流程图
3 试验验证
系统采用250Kpbs的通信波特率,结合台架试验和CAN总线实际通信。结果证明:系统各ECU工作正常,各控制器之间通过CAN总线通信,实现了传感器测量数据的信息共享、控制指令的发送和接收,达到了系统设计指标及功能;CAN总线工作稳定、可靠,具有较强的抗干扰能力,完全满足混合动力汽车实时控制要求。图4~图7发动机转速在1200、1600、2000、2400 r/min下XL2000混合动力汽车台架试验系统负荷特性试验曲线,除去燃油消耗外,其它的数据信息是通过CAN总线接收的。其中,曲线系列1~系列7分别为司机踏板位置(%)、节气门开度(%)、发动机水温、燃油消耗率、系统扭矩输出、电机扭矩指令、电机的电压、电流、电池的剩余电量。
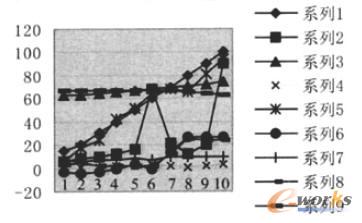
图4 发动机转速为1200r/min
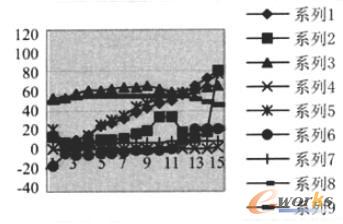
图5 发动机转速为1600r/min
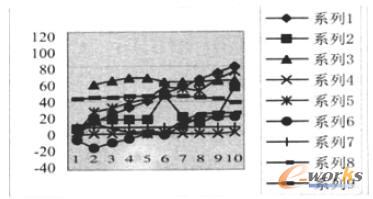
图6 发动机转速为2000r/min
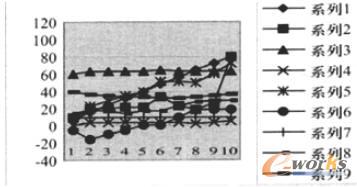
图7 发动机转速为2400r/min
4 结束语
在研究CAN应用层协议及J1939协议的基础上,针对所开发XL2000混合动力汽车,介绍了基于CAN总线的控制系统工作原理,对各控制器ECU的状态作了描述,并进行了系统设计。系统台架试验证明,系统能完成整车控制系统的正常通信,很好地实现了混合动力汽车的控制策略,具有较强的故障诊断及处理能力,可靠性高,实时性好,达到了较高的性能指标。
CAN总线混合动力汽 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)