CC—Link总线在铣床运动控制中的应用
在现代机械制造业中,用户不仅对机床加工性能提出了更高的要求,而且对自动化生产线上的加工设备提出了集中管理、分散控制的新要求。以普通铣床数控化改造后的运动伺服控制系统为研究对象,实现基于CC—Link现场总线的多台铣床同步控制,充分利用PLC的高可靠性、编程简单、功能强大、体积小、经济合算等优点,提高铣床的加工精度和生产效率,从而体现了CC-Link总线技术在自动化生产线中低成本、高可靠性、可维护性和智能化数据采集的优势。
1 CC-Link简介
CC-Link(Control&Communication Link,控制与通信链路系统)是三菱电机基于“多厂家设备环境、高性能、省配线”理念开发的,以设备层为主,同时也覆盖了位于较高层次的控制层和较低层次的传感器层次,能够同时高速处理控制和信息数据,实现高效、一体化和过程自动化控制的一种开放式现场总线系统。CC-Link现场总线具有高速、高实时性以及完善的RAS(Reliability、Availability、Serviceability)功能和开放的多厂商设备环境,网络拓扑结构多样,可连接各种智能设备,能够实现分散控制。
2铣床进给运行过程
铣床工作台的进给运行分为点动和自动循环两种方式。点动包括步进(点动前进)和步退(点动后退),目的是调整工作台到达合适位置,以便安装待铣削工件和实现对刀操作;自动循环加工时是通过工作台的循环往复运动对工件进行铣削加工,其往返行程由装在床身的4只限位开关(接近开关)来控制,限位开关被安装在工作台侧面相互垂直的两个平面位置,当A, B两个挡块与其接触时发出反馈信号。限位开关安装位置如图1所示。
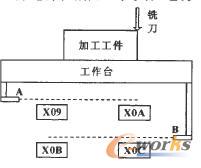
图1工作台行程限位开关示意图
3 CC-Link控制系统的组建
3. 1拉制系统整体方案构建
在构建的CC-Link网络中,主要由1个主站和3个本地站组成,网络拓扑结构如图2所示。对于单台铣床的控制,根据铣削加工工艺要求,需要由1台三相鼠笼式异步电动机、3台交流伺服电动机和与各台电动机相配套的控制模块,以及接近开关、指示灯等设备组成。其中三相异步电动机由PLC控制变频器实现调速,伺服电动机由伺服驱动器驱动。
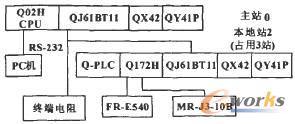
图2 CC-Link控制系统的网络拓扑结构
3.2 CC-Link网络系统功能模块配置
一个CC—Link网络中所使用的各种功能模块包括:电源模块、PLC CPU模块、I/O模块、运动控制模块以及通信模块。主站单元由三菱高性能Q02HCPU、CC-Link通讯模块QJ61BTI1、64点的DC输入模块QX42和32点的QY41P型晶体管输出模块组成,主站用于实现对3台铣床的远程同步控制,并协调各台铣床的相互加工过程。
本地站为2号站、4号站和6号站,分别用于控制3台铣床各自的进给运动。本地站的硬件配置与主站不同之处在于使用了专门的Q172H型运动控制CPU,该CPU通过MR—J3—10B型通用交流伺服放大器来控制相应运动轴的伺服电机,从而实现铣床的进给运动。此外增加了64点的DC输入模块QX42和32点的QV41P型晶体管输出模块,采用三菱FR-E540系列变频器实现对主轴的调速控制,本地站通信模块采用CC-Link网络通用的QJ61BTll模块来实现与主站和其他本地站的通信。
3.3 本地站输入输出信号地址分配
在铣床运行控制过程中,主要的控制信号有主轴启停信号、主轴调速信号、点动进给信号、工作台位置检测信号以及各运动轴运动控制信号等。下面以本地站(单台铣床)直线进给过程为例说明其控制过程:
(1)主轴启停信号。对每台铣床的主轴启停控制是各自独立的,由三相鼠笼式异步电机驱动运转,控制主轴的正反转,并通过按钮开关实现信号输入。
因此对铣床主轴的控制需要3个输入信号。
(2)铣床急停信号。当给铣床一个急停信号时,主轴停止运转并且伺服系统停止进给,这样需要1个输入信号和1个输出显示信号。
(3)点动进给信号。这一类信号包括工作台的石、y方向进给信号和主轴沿z方向进给信号,运动过程中需要完成工作台的前进/后退和左右移动,以及主轴沿z方向的上下移动,这样共需要6个输入信号。
(4)极限位置检测信号。为了防止工作台和主轴运行过程中超出工作行程,需要在工作台两端和主轴立柱上设置限位开关,当工作台或主轴到达限位开关位置时自动触发限位信号,使铣床停止进给运行并提示报警信号。在相互垂直的3个方向上共需要设置6个极限位置检测输入信号和1个输出信号。
(5)各运动轴运动状态信号。显示各运动轴正常运行的状态,需要3个输出信号。
(6)回零及回零完成信号。执行铣床回零操作时,先执行z方向回零操作,然后执行Z和Y方向回零过程,回零完成后显示各运动轴完成回零位状态,需要3个输入信号和3个输出
CC—Link总线铣床运动控 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)