工业以太网和CAN总线在污水处理系统中的应用
引言
目前,污水处理厂运用集散控制系统模型可以最大限度提高污水处理厂运行可靠性,提高出水水质,降低能耗和工人劳动强度,达到提高经济效益的目的。可编程计算机控制器(prograrnrnable ComputerController,简称PCC)以其可靠性高、编程方便、耐恶劣环境、功能强大等特性已成为工业控制领域中增长速度最迅猛的工业控制设备,它能很好地解决工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题。
随着工业以太网技术、现场总线技术的发展,由现场总线与工业以太网构建的“一网到底”工业控制网络系统,使得工厂的高层管理人员能直接获得工业现场的控制信息,实现工厂管理与生产现场的无缝集成。根据污水处理行业的特点,设计了基于工业以太网和现场总线的污水处理控制系统的整体解决方案。本文以兰州某县的污水处理为例,介绍了基于贝加莱PCC、工业以太网和CAN现场总线的污水处理自动控制系统的实现。PCC通过以太网与现场控制设备间建立通信,从而实现数据现场设备的自动控制。
1系统分析及设计
1.1控制要求分析
该污水处理厂日处理污水量为5.0万米3/天,出水标准要求实现国家《城镇污水处理厂污染物排放标准》一级B标准。对污水进行三个阶段的处理。一级处理:主要去除污水中呈悬浮状态的固体污染物质,经过一级处理的污水,BOD一般可去除30%左右。二级处理:主要去除污水中呈胶体和溶解状态的有机污染物质(BOD,COD物质),去除率可达90% 以上,使有机污染物达到排放标准。三级处理:进一步处理难于降解的有机物、氮和磷等能够导致水体富营养化的可溶性无机物等;处理工艺采用CASS池工艺生化处理,之后在接触池加氯使尾水达标后排入黄河。污泥处理采用机械浓缩脱水处置工艺泥饼外运卫生填埋,污水处理流程如图1所示。
1.2 系统方案确定
基于以上特点,显然系统属于典型的分布式控制系统。在和传统方案比较后,采用基于工业以太网标准TCP/IP和CAN现场总线结合的分布成网络系统构架,完成该污水处理厂的自动控制系统设计。主要基于以下几点考虑:
(1)工业以太网重点在于利用交换式以太网技术为控制器和操作站,各种工作站之间的相互协调合作提供一种交互机制,并和上层信息网络无缝集成。目前工业以太网开始在监控层网络上逐渐占据主流位置,正在向现场设备层网络渗透。
(2)由于CAN总线具有强有力的错误检测能力及差分驱动功能,在强噪声的苛刻环境中仍运行良好,因此在传媒传输和线路设计方面,CAN总线可以很容易的适合大多数应用场合。CAN采用多主站工作,并且总线最多可挂接110个节点,因此系统中各功能模块都可以直接挂接到总线上。根据现代控制系统既需要集中管理,又需要分散实时控制的工艺要求,污水处理自动控制系统采用现场总线式集散控制系统,采用CAN总线技术,可以将信息在现场处理,极大地提高其可靠性、实时性。
(3)将工业以太网和CAN总线很好的结合在一起,实现无缝集成。可以使工业以太网和现场总线各显其能,形成优势互补,提高系统整体性能。
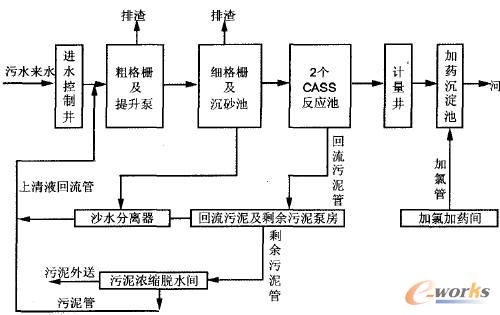
图1 污水处理流程图
2 系统设计与实现
2.1 控制方案
根据污水厂的分布情况,设置三个PCC现场控制站,主要功能是实现对所有现场在线仪表的数据采集,分别设置在三个位置。
(1)PCC1为污泥脱水机房控制室:主要功能是负责贮泥池、污泥脱水机房、冲洗水池的设备控制及数据采集。
(2)PCC2为粗格栅及污水提升泵房控制室:负责粗格栅及污水提升泵房、细格栅及沉砂池、配水井、进厂水水质的设备控制及数据采集。
(3)PCC3为变配电室控制室:主要功能是负责鼓风机房、CASS反应池、接触池、加氯间、出厂水水质的设备控制及数据采集。
其中3号站变配电室现场控制站包括四个远程站,分别设置在CASS反应池滗水器附近。在工艺流程各个环节中设置了完整的全过程检测仪表,如流量、液位、压力、PH、溶氧仪等检测仪表,确保对工艺全过程运行状态、水量、水质的监控,满足各环节的自动控制需要。
该控制系统采用开放的分布式控制系统,整个污水厂自控系统由中央控制室操作员站、现场PCC控制站和现场仪表组成。中央控制室操作员站和现场PCC控制站之间通过工业以太网连接,数据和参数可以在PCC与中央控制室管理站之间相互传送 ;PCC控制站和现场仪表之间通过现场总线和4~20mA进行数据传输。
2.2 系统硬件与网络结构设计
本系统下位机采用三台贝加莱X20高性能X20CP1485控制器,该控制器自带以太网和CAN总线通信接口,其处理频率达到Celeron 400MHz,达到400μs任务执行时间。通过编制控制程序,对污水处理
工业以太网CAN总线污水处理系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)