基于1553B总线的航天大功率电动舵机控制器设计
时间:12-21
来源:互联网
点击:
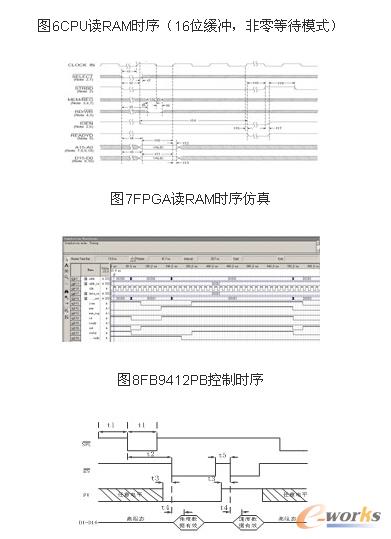
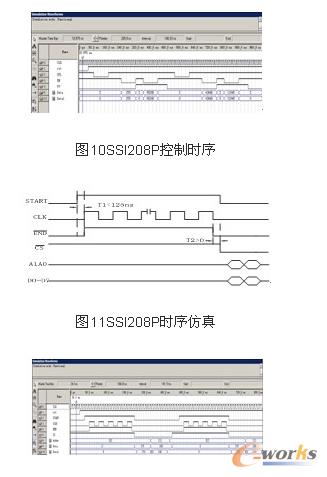
8P,该模块自动将同步串行接口信号(SSI)转换成8位并口数据,数据更新率大于100KHZ。 限位保护电路 最大限位保护电路通过安装在电机丝缸正反向最大行程处的限位开关实现,选用海立Z15G1微动开关。当丝缸运动到最大行程处时,对应开关接通,故障信号传递给DSP芯片中断口,直接关断六路PWM。 3 软件设计 控制系统软件设计主要包括两部分内容:DSP主控程序设计和FPGA逻辑控制程序设计。DSP程序采用C语言编写,通过CCS3.3编译。FPGA采用Verilog语言编写,通过QuartusⅡ编译。 3.1 DSP主程序设计 DSP主要实现了控制系统主程序和电流、位置、速度三闭环数字PID控制算法。FPGA将接收到的舵面偏转信号和采集到的转子位置、转速和实际舵面偏角传递给DSP,DSP结合自身ADC采样电流信号,通过算法处理,输出调制PWM。程序流程如图5所示。 图5DSP主程序流程 3.2 FPGA逻辑程序设计 FPGA程序采用模块化设计思想,实现了BU-61580读写RAM控制时序、FB9412PB控制时序、SSI208P控制时序和DSP接口控制逻辑。各个模块的时序控制如图6-11所示。 4 结论 本文设计实现了一套基于1553B总线通讯的大功率无刷直流电动舵机控制器,利用DSP高速运算性能实现电流、速度、位置三闭环控制算法,充分运用FPGA灵活可配置性设计时序逻辑控制电路,采用BU-61580协议芯片实现1553BRT终端控制器。实际应用表明,该控制器控制精度高、调节速度快,具有良好的工程应用价值。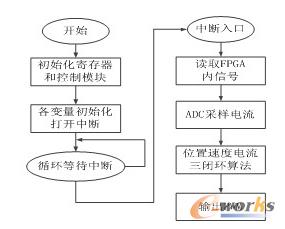

1553B总线航天电动舵机控制 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)