SAM4E单片机之旅——19、CAN间通信
CAN协议具有良好的可靠性,在工业中应用广泛。这次就先熟悉CAN的基本功能。
开发板有两个CAN,每个CAN有8个信箱。这次内容是从CAN0的信箱0发送数据到CAN1的信箱0。
除本次使用的功能外,CAN还有远程帧、强大的错误处理功能。
一、电路
CAN总线上的逻辑数值是用显性电平和隐性电平表示的。“显性”的意思是指在同时传输显性电平和隐性电平时,总线上呈现的是显性电平。显性电平表示逻辑“0”,隐性电平表示逻辑“1”。
在使用CAN的过程中,需要使用一个CAN收发器进行电平的转换与解释。开发板使用的CAN收发器为SN65HVD234,其接线如下图所示:
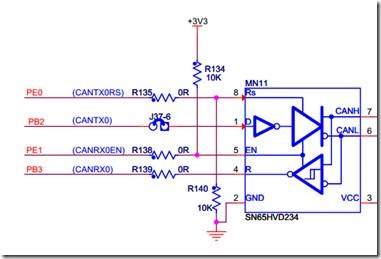
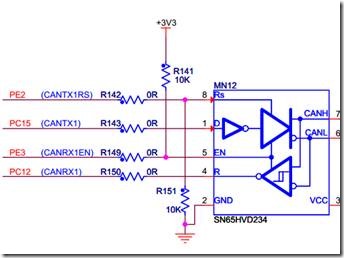
其中CANTXx和CANRXx引脚可以复用为CAN的外设。而在使用该收发器时,需要将CANRXxEN驱动为高电平以启用收发器的接收功能,将CANTXxRS驱动求低电平以启用发送功能。
在实验的时候,需要将这两个口(J13和J14)使用线缆连接起来。当连接完成而未通电时,可以测得CANH和CANL是短路状态的。
二、CAN网络参数及波特率
假设MCK为96 MHz,需要设置的CAN波特率为1000 Kbps。
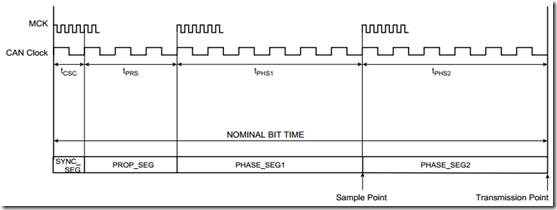
CAN的波特率的设置不是那么的直接。CAN定义了一个名为“原子时间(TQ)”的最小时间单位;然后把一个比特的传输过程分为若干阶段(同步段、传播时间段、相位缓冲端1、相位缓冲段2),每个阶段的时间均是由TQ的数量表示。
SAM4中,时间TQ用“CAN系统时钟(CSC)”表示。波特率相关的参数均通过CAN波特率寄存器(CAN_BR)设置。
TQ(CSC)设置。组成每个位时间的TQ数量的范围为8—25。为取整,这里将数量选择为16。所以CAN系统时钟的频率为CAN波特率的16倍,即16 MHz。再所以需要将MCK进行6分频。根据BRP字段的作用方法,需要将BRP字段设置为5。
同时,可以计算出每个TQ的长度为62.5 ns。
同步段固定为1 TQ。
传播时间端PROP_SEG需要根据硬件相关的信息确定,用于吸收网络的物理(发送单元、总线、接收单元)延迟。该段的时间需要为总物理延迟的2倍。在芯片手册的示例中,该延迟为190 ns。所以该段的时长需要设置为380 ns,即约6 TQ。将PROPAG字段设置为5即可达到目的。
剩下的16-1-6=9 TQ,均用与相位缓冲段。在Atmel的CAN中,需要2 TQ确定总线的电平。因为采样点位于相位缓冲段2的起始,所以它的长度不能少于2 TQ 。这里使两个阶段尽量等长,所以让相位缓冲段1设置为4 TQ,段2设置为5 TQ。将PHASE1和PHASE2分别设置为3和4即可。
再补偿宽度。最小可配置为1 TQ,最多可配置为相位缓冲段1和4 TQ间的较小值。这里配置为4 TQ。将SJW段设置为3即可。
具体设置代码如下:
const uint32_t can_br = CAN_BR_BRP(5)
CAN_BR_PROPAG(5)
CAN_BR_PHASE1(3)
CAN_BR_PHASE2(4)
CAN_BR_SJW(3)
CAN_BR_SMP_ONCE;
CAN0->CAN_BR = can_br;
CAN1->CAN_BR = can_br;
三、CAN初始化
GPIO及PMC设置。注意将PE1和PE3驱动为高电平,PE0和PE2驱动为低电平。
网络参数设置。在启用CAN之前,需要设置好网络参数。
启用CAN。CAN使能后,需要和总线进行同步。在连续检测到11个隐性位时,CAN进入唤醒状态,且WAKEUP位置位:
CAN0->CAN_MR = CAN_MR_CANEN;
CAN1->CAN_MR = CAN_MR_CANEN;
while( ((CAN0->CAN_SR & CAN_SR_WAKEUP) == 0)
((CAN1->CAN_SR & CAN_SR_WAKEUP) == 0) );
信箱设置。通过设置CAN_MMR的MOT字段即可设置信箱的类型。由于这个设置是立即生效的,所以在设置这个字段时,需要先(或同时)完成其他相关信息的设置。同时,在修改设置时,应该先关闭信箱。
发送信箱需要先设置好的只有优先级:
#define TX_MB (CAN0->CAN_MB + 0)
TX_MB->CAN_MMR = CAN_MMR_PRIOR(0)
CAN_MMR_MOT_MB_TX;
接收信箱需要先设置好ID相关的信息。简单起见,这里只使用标准格式的帧,即只指定MIDvA部分,同时MIDE位指定为0(默认)。由于符合接收条件的ID设置为1个,即需要比较接收ID所有的位,所以将CAN_MAM的MIDvA字段全部置1。
#define RX_MB (CAN1->CAN_MB + 0)
#define CAN_COMM_ID 5
RX_MB->CAN_MID = CAN_MID_MIDvA(CAN_COMM_ID);
RX_MB->CAN_MAM = CAN_MAM_MIDvA(~(uint32_t)0);
RX_MB->CAN_MMR = CAN_MMR_MOT_MB_RX;
四、数据传输
通过UART读取一个
- SAM4E单片机之旅——24、使用DSP库求向量数量积(05-08)
- SAM4E单片机之旅——23、在AS6(GCC)中使用FPU(05-02)
- SAM4E单片机之旅——22、GMAC和PHY的介绍与初始化(04-28)
- SAM4E单片机之旅——20、DMAC之使用Multi-buffer进行内存拷贝(04-24)
- SAM4E单片机之旅——18、通过AFEC(ADC)获取输入的电压(04-17)
- SAM4E单片机之旅——21、DMAC之USART回显(04-26)