单片机如何设计防抖动程序(源代码),单片机高阻态怎样克服?
常常说的海平面,在单片中也是如此,我们无论说是高电平还是低电平都是相对来说的。
在51单片机,没有连接上拉电阻的P0口相比有上拉电阻的P1口在I/O口引脚和电源之间相连是通过一对推挽状态的FET来实现的,51具体结构如下图。
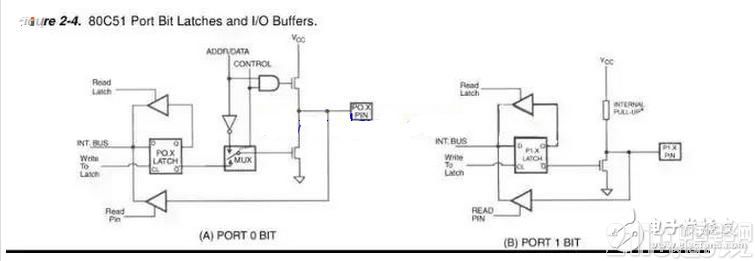
51结构图
组成推挽结构,从理论上讲是可以通过调配管子的参数轻松实现输出大电流,提高带载能力,两个管子根据通断状态有四种不同的组合,上下管导通相当于把电源短路了,这种情况下在实际电路中绝对不能出现,从逻辑电路上来讲,上管开-下管关开时IO与VCC直接相连,IO输出低电平0,这种结构下如果没有外接上拉电阻,输出0就是开漏状态(低阻态),因为I/O引脚是通过一个管子接地的,并不是使用导线直接连接,而一般的MOS在导通状态也会有mΩ极的导通电阻。
排阻
无论是低阻态还是高阻态都是相对来说的,把下管子置于截止状态就可以把GND和I/O口隔离达到开路的状态,这时候推挽一对管子是截止状态,忽略读取逻辑的话I/O口引脚相当于与单片机内部电路开路,考虑到实际MOS截止时会有少许漏电流,就称作“高阻态”
由于管子PN节带来的结电容的影响,有的资料也会称作“浮空”,通过I/O口给电容充电需要一定的时间,那么IO引脚处的对地的真实电压和水面浮标随波飘动类似了,电压的大小不仅与外界输入有关还和时间有关,在高频情况下这种现象是不能忽略的。
单片机程序死机,跑飞了可以从以下几个方面查找原因:
1、意外中断。是否打开了某个中断,但是没有响应和清除中端标志,导致程序一直进入中断,造成死机假象;

2、中断变量处理不妥。若定义某些会在中断中修改的全局变量,这时要注意两个问题:首先为了防止编译器优化中断变量,要在这些变量定义时前加volaTIle,其次在主循环中读取中断变量前应该首先关闭全局中断,防止读到一半被中断给修改了,读完之后再打开全局中断;否则出现造成数据乱套。
3、地址溢出,常见错误为指针操作错误。我要着重说的是数组下标使用循环函数中循环变量,如果循环变量没控制好则会出现数组下标越界,意外修改系统的寄存器造成死机,这种情况下如果死机说明运气好,否则后面不知道发生什么头疼的事。
4、无条件的死循环;比如使用while(x);等待电平变化,正常情况下x都会变成0,就怕万一,因此最好加上时间限制;

5、看门狗没有关闭。有的单片机即使没使用看门狗开机时也有可能意外自动开启了最小周期的看门狗,导致软件不断复位,造成死机,这个要看芯片手册,最好在程序复位后首先应该显式清除看门狗再关闭看门狗;
6、堆栈溢出。最难查找的问题,对于容量小的单片机,尽量减少函数调用层级,减少局部变量,从而减少压栈的时候所需的空间。当你把以上几条都试过不能解决问题,试一试把你的被调用少函数直接内置到调用的地方并且把占用RAM大的局部变量改成全局变量,试一试说不定就可以了。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)