一款宠物狗无线感知交互系统让人和动物的社交网络成真
目标是对宠物狗的体语、尾语、活跃状态进行感知,通过终端分析计算,与现有行为学研究资料结合模拟宠物狗的心理变化。
系统硬件结构框图如图2所示,以下是对图中主要硬件模块的详细描述。
加速传感器:体语感知要用到两个三轴加速传感器。根据用户自身需要(例如:宠物狗是否有尾巴,四肢是否具有特殊意义的动作特征等)可选用若干个二轴加速传感器置于宠物狗身体各部分。体语感知所用的三轴加速传感器分别位于宠物狗的上半身和下半身,可用于检测宠物狗的各种基本行为状态(例如:趴下、坐下、侧身翻滚、快跑、慢跑等)和统计宠物狗的活跃状态(即与运动时间、静止时间相关的状态系数)。由于宠物狗的四肢、尾巴主要活动于二维平面内,故该部分以二轴加速传感器足以检测其运动状态,较之三轴加速传感器其成本、功耗较低。
音频识别模块:将单片机中的设定(即宠物狗的不同叫声信息,包括默认添加的通用类型和用户通过客户端自行添加的叫声类型)发送至音频识别芯片中,通过置于宠物狗项圈处的音频接收器进行采集,对比原先设定,判断叫声类型,并把判断结果发送到AVR单片机中。
环境条件传感器:包括温度、光照等传感器。将当前宠物狗所处室内环境参数发送至单片机中进行处理,当达到某一门限值(可由用户设定)时,将由单片机发送指令启动温度调节等外部环境改善设备。由于宠物狗所处室内环境温差不会太大,故该系列传感器可置于室内固定地点(例如:狗屋),减少宠物狗身上携带的传感器数量,以减轻其负担。
集成无线模块的AVR处理器:主要用于对各个传感器输出的数据和用户的设定进行传输与处理。例如:对于加速传感器的数据进行预处理(例如:将三轴加速传感器的三路输出整合为一路输出)后发送、根据用户设定将宠物狗叫声特征信息送入音频识别芯片中、判断当前环境状态并向本地电脑发送相关信息等。
外部设备:(1)自动喂食装置。市面上有通过手动机械结构实现对宠物食物的定量管理,只要稍加改装就可以实现用户通过客户端或手机对其进行自动控制、定时定量对宠物进行远程喂食。(2)温度调节器。根据本地电脑发出的信号自动实现温度升高与降低,计划利用普通51单片机实现简单的自动控制。(3)其它外部设备。视系统需要及开发进度决定比赛规定时间内是否进行扩展设计。
3.2 硬件平台选用及资源配置
考虑到宠物狗佩戴的舒适性,以及比赛方提供的开发平台体积,我们团队决定自制板卡以减小宠物狗身上所佩戴器件的体积,提高其舒适度。以下为所需的相关器件及资源:
1.ATMEGA128RFA1:该芯片集成了低功耗的AVR单片机及支持ZigBee协议的无线传输模块。鉴于ZigBee的自组网特性,选用该芯片能简单地实现传感器模块的扩展,且该芯片体积小、性能高、具有丰富的片内资源和ATMEL软件库的支持,足以满足系统设计需要。
2.基于MEMS架构的三轴和两轴加速度传感器,该类型传感器体积小、功耗低、精度高,符合本系统的性能要求与功能需要。
3.音频采集器、音频识别芯片。
4.光照、温度传感器。
5.加热器、自动喂食器等外部设备。
3.3系统软件架构
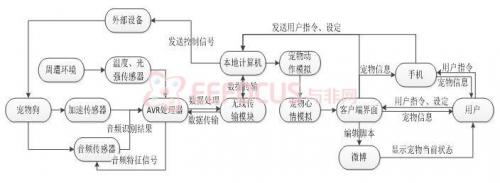
图3 系统软件结构框图
系统软件结构框图如图3所示。传感器先将数据传至AVR单片机,然后经软件初步处理后发至本地计算机,本地计算机再根据用户的设定模拟出宠物当前动作和心理状态并显示在客户端界面。此时,客户端可根据用户设定或指令将宠物信息经微博或手机传送给用户,用户也可通过电脑对客户端进行本地或远程的直接操作。
下面是本系统中两个关键部分的软件流程:
AVR单片机程序流程
AVR单片机中的程序流程图如图4所示。
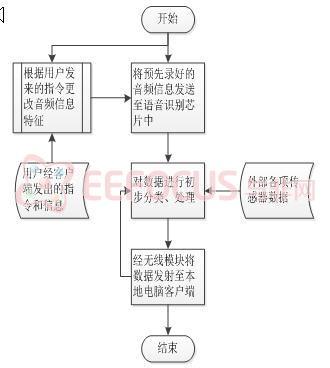
图4 AVR单片机程序流程
首先,单片机将其中预先设置好的音频特征信息送入到音频识别芯片中(用户可根据自身宠物情况录制音频信息并进行自定义,然后经客户端发送至AVR单片机内,以扩展音频识别芯片对宠物狗声音识别的类型),接着开始接收各项传感器的数据,并经初步处理后,以一定的速率和频率(以兼顾实时反映宠物状态和尽可能减少系统功耗为前提)发送至本地电脑客户端,以便进一步的分析和处理。
客户端程序流程
电脑客户端的程序流程如图5所示。
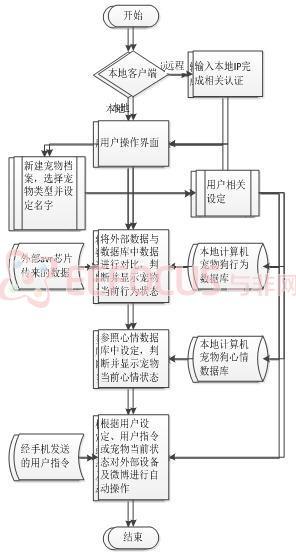
图5 客户端程序流程图
(1)用户在电脑上安装客户端后可通过本地(本计划书中本地均指宠物狗所在地)或远程登录使用客户端。登录客户端后,可在用户操作界面建立多个宠物档案(即一个客户端可反映家中多只宠物狗的行为心理状态)。
(2)可按照自家宠物情况添加其独特的行为特征及相应心理状态。客户端通过将由AVR芯片发来的数据与数据库中宠物狗行为特征数据做比较,判断其当前行为状
无线感知交互系统 加速传感器 音频识别 ATmega128RFA1 AVR 相关文章:
- Flash损耗均衡的嵌入式文件系统设计(06-01)
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的ISP1362OTG设计(09-06)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 案例分析:基于AVR32的隧道环境监测系统(03-18)
- 科技帮我们远离灾难:灾难检测飞行器(03-18)